2.2. 퍼징 시스템
2.2. 퍼징 시스템
1) 도장로봇 제어기의 퍼지(purge) 시스템은 아래 그림2.1과 같습니다. 각 모듈별로는 크게 퍼지상태 표시부, 퍼지제어 유닛부, 공압 유닛부, 에어호스 및 압력센서부로 구성되어 있습니다.
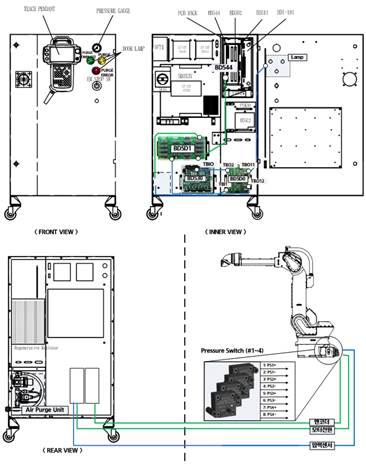
그림 2.1 도장로봇 제어기 에어퍼징 시스템
2) 에어 퍼징용 압력 게이지와 동작상태 LAMP, 그리고 공압기기들의 배치가 그림2.2에 나타나 있습니다.


그림 2.2 에어퍼징 공압기기 배치 및 동작상태 표시
3) 표2-1은 에어퍼징에 필요한 압력의 기준과 표시, 그리고 동작상태 LAMP를 설명합니다.
표 2‑1 에어퍼징을 위한 압력설정 및 동작상태 표시
PRESSURE GAUGE & Regulator | 퍼지제어 공압회로에 입력되는 공압을 표시하며, 입력되는 공압은 0.2MPa ~ 0.3MPa이 되도록 그림 2.2의 공압기기 내의 Regulator로 맞추어야 합니다. |
PURGE COMPLETE LAMP | 에어퍼징 동작 완료 시 점등됩니다. |
PURGING LAMP | 에어퍼징 동작 중에 점등됩니다. |
PURGE ERROR LAMP | 에어퍼징 동작 중에 에러발생시 점등됩니다. |
4) 그림 2.3은 에어퍼지 제어용 BD5D0보드이며, 주 전원 ON시 정해진 시간 동안 에어퍼징 동작을 수행합니다. 에어퍼징 시간설정은 제어기 출하 시 고정되어 있으며 변경이 필요한 경우는 제어기 보수설명서 참조바랍니다.
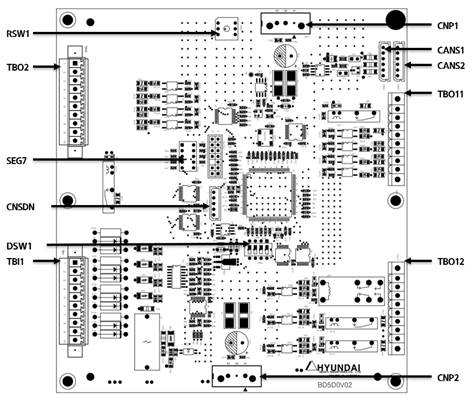
그림 2.3 에어퍼지 제어(BD5D0)보드
표 2‑2 BD5D0 커넥터 종류와 용도
명칭 | 용도 | 사양 |
CNP1 | 제어 전원 | 5V |
CNP2 | 24V IO 전원 | 24V/5A SMPS |
TBI1 | 압력 스위치 연결 | 24V IO 전원 |
TBO11 | 상태표시등 연결 | 24V IO 전원 |
TBO12 | 에어퍼지밸브 제어 신호 | 24V IO 전원 |
TBO2 | 퍼지 상태 신호 | BD530 TBIO |
각 신호 연결은 전기도면 중 PURGE CONTROL CONNECTION (R63-012227-0.0) 도면을 참고할 수 있다.
로봇 몸체 내부의 압력 상태를 감시하기 위한 압력 스위치를 모니터한다. 스위치의 상태는 TBI 1 커넥터 옆의 LED를 통해 동작 상태를 육안으로 확인할 수 있다.
표 2‑3 압력센서(TBI1) 커넥터 신호 설명
단자번호 | 신호명(TBI 1) | 설정압력 | 신호 설명 |
1, 2 | PS1+, PS1- | 180Pa | Low Pressure Sensor 1 |
3, 4 | PS2+, PS2- | 200Pa | Low Pressure Sensor 2 |
5, 6 | PS3+, PS3- | 5.2kPa | High Pressure & Flow Sensor 1 |
7, 8 | PS4+, PS4- | 4.4kPa | High Pressure & Flow Sensor 2 |
9, 10 | - | - | Not Used |
퍼징 시퀀스는 제어기 전면 도어 램프를 통해 상태를 확인할 수 있다.
표 2‑4 Lamp출력 (TBO11) 커넥터 신호 설명
단자번호 | 신호명 | 신호 설명 |
TBO11, 3 | P/Error | 빨간색. 퍼징 동작 중 에러 |
TBO11, 5 | Purging | 노란색. 퍼징 동작 진행 중 |
TBO11, 6 | P/Complete | 녹색. 퍼징 동작 정상 종료 |
퍼징 시퀀스에 따라 솔레노이드 밸브를 통해 공압 출력을 제어하며, 퍼징이 정상적으로 마무리 되었을 때 엔코더 릴레이 보드를 동작시켜, 엔코더와 서보보드가 전기적으로 연결된다.
표 2‑5 밸브 및 릴레이 제어 (TBO12) 커넥터 신호 설명
단자번호 | 신호명 | 신호 설명 |
TBO12, 3 | EVP1- | Solenoid Valve On/Off |
TBO12, 5 | EnRLY_PWR | Encoder Barrier Relay On/Off |
BD530으로 IO 출력을 통해 현재의 상태를 전달한다.
표 2‑6 상태 출력 (TBO2) 커넥터 신호 설명
단자번호 | 신호명(TBO2) | 신호명(TBIO) | 신호 설명 |
TBO2, 6 | M_DI 1 | DI 1 | Low Pressure Error |
TBO2, 7 | M_DI 2 | DI 2 | High Pressure Error |
TBO2, 8 | M_DI 3 | DI 3 | Low Flow Error |
TBO2, 9 | M_DI 4 | DI 4 | Purge Complete |
TBO2, 2 | M_DO 1 | DO 1 | 보드 reset |

§ 에어 퍼징 기능은 로봇제어기의 사용용도 설정이 ‘도장’으로 설정되어야 정상 동작합니다. 사용용도 설정 방법은 ‘3.1절 기본설정’에 기술되어져 있으니 참조하시기 바랍니다.
§ 에어 퍼징 동작 동안에, 발생하는 에러에 대한 내용과 그 조치 사항은 ‘5.1절 에러 메시지’를 참조하시기 바랍니다.
§ 에어 퍼징에 필요한 공기압력은 규정한 기준 내에 유지하여야 하므로 반드시 준수하여 주시기 바랍니다.