2.3. 에어퍼징 프로세스
2.3. 에어퍼징 프로세스
1) 현대 로봇 제어기의 주전원을 올리면 압력방폭을 위해 3분동안 고 압력의 공기가 퍼지벨브를 통해 로봇 본체로 유입되는 에어퍼징 프로세스가 동작합니다. 이때 제어기는 에어퍼징 동작이 완료될 때까지 부팅을 멈추고 퍼징 완료대기 상태에서 공기압 상태 검출 센서의 에러가 발생하는지 검사합니다. 그림 2.4는 에어퍼징 시퀀스에 대한 Flow Chart를 나타내고 있습니다.
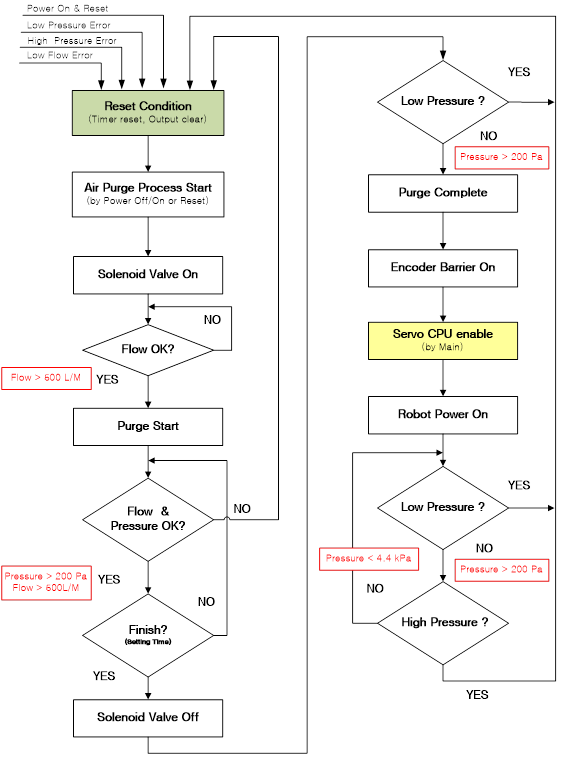
그림 2.4 Air Purge Sequence Flow Chart
2) 그림2.5는 에어퍼징 프로세싱 동안에 방폭용 센서들의 검지 시점과 에러상태의 타이밍도를 표시하고 있습니다.
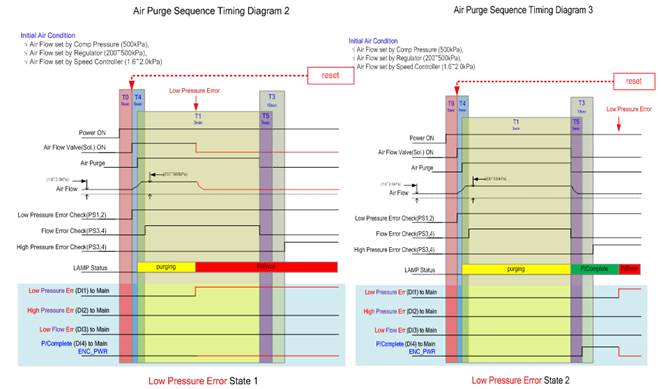
그림 2.5 에어퍼징 절차 및 상세 타이밍도
3) 에어퍼징이 진행 중에는 어떤 조작도 금지되어 있으며 티치펜던트 화면 하단 오른쪽에 <Air-Purging 중>을 표시합니다.
4) 에어퍼징 동작이 완료되고 나면 제어기는 부팅을 시작하고 자기진단 모드로 진입하여 시스템 검사와 함께 조작할 수 있는 상태로 전환됩니다.
5) 에어퍼징 동작에서 공기압 에러가 발생하면 제어기의 부팅은 시작되고 조작상태에 진입하지만 티치펜던트 화면 하단 오른쪽에 <Purging Error!!!>가 표시되고 에러를 조치하기 전에는 로봇에 모터의 구동 전원을 투입할 수 없게 됩니다.
6) 에러 조치가 되고 나면 제어기의 전원을 껐다 켜지 않아도 티치펜던트의 [RESET]을 누르고 에어퍼징 프로세스와 제어기 리부팅을 동시에 실시할 수 있습니다.
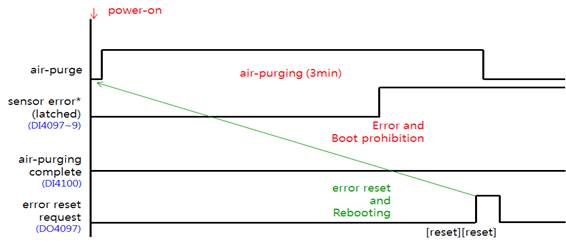
그림 2.6 부팅 중 에러 발생 시 재부팅 프로세스
§ Sensor error는 공기압 Low, 공기압 High, Flow rate이상 에러가 BD530 TBIO 콘넥터의 1~3번포트(DI4097~DI4099)로 입력되고 에러가 발생하면 활성화 됩니다.
§ 에어퍼징이 완료되면 air-purging complete 입력신호인 BD530 TBIO 4번째 포트인 DI4100으로 입력되고 정상 상태이면 활성화 됩니다.
§ 에러 및 퍼징완료 센서의 입력신호는 도장응용 용도의 조건에서 『[F1]:서비스』 →『1:모니터링』→『2:입출력신호』→『1:전용입력신호』를 선택한 후, 모니터링 창을 열고 하단에서 “압력센서 (Low)”,”압력센서(High)”, 입력 상태를 확인할 수 있습니다.
§ 에어퍼징 에러 발생하여 에러 Reset을 할 때는 [RESET][RESET]을 누르면 BD530 TBIO 콘넥터의 1번 포트인 DO4097로 출력하여 에어퍼징 컨트롤러를 리셋하게 됩니다.
§ 리셋 신호는 도장응용 용도의 조건에서 『[F1]:서비스』→『1:모니터링』→ 『2:입출력신호』→『1:전용출력신호』를 모니터링 창을 열고 하단에서“Purge Reboot”출력 상태를 확인할 수 있습니다.