2.2. 힘센서 설치
2.2. 힘센서 설치
본 절에서는 센서의 종류에 무관한 일반적인 내용만을 다루고 있습니다. 센서별 자세한 설치법은 부록을 확인하십시오.
① 로봇의 R1축과 R2축을 0deg로 맞춘 후 해당 센서를 로봇에 부착합니다.
② 센서와 로봇 제어기를 해당 통신케이블로 연결합니다.
③ 센서 및 통신모듈에 전원케이블을 연결하여 전원을 공급합니다.
④ 센서에 해당하는 통신 환경을 알맞게 설정해줍니다.
A. 이더넷통신을 사용하는 센서(예: ATI사 6축 센서)
TP에서 EN2(범용)의 IP를 그림 1과 같이 설정합니다. IP 주소의 마지막 칸은 2~255사이의 숫자를 입력하십시오.
(『[F2]: 시스템』 → 『2: 제어 파라미터』 → 『9: 네트워크』 → 『1: 환경설정』)
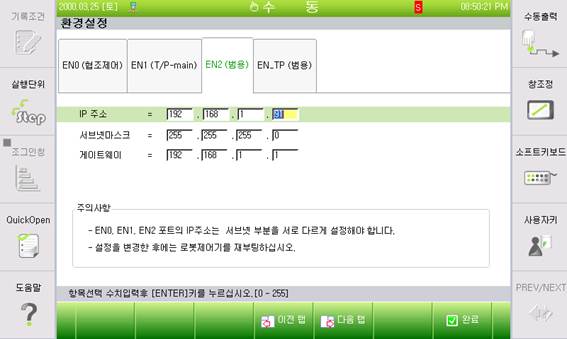
그림2.1 제어기 네트워크 환경설정
B. 시리얼 통신을 사용하는 센서(예: Burster사 로드셀)
제어기에 연결된 시리얼 포트를 다음 경로에서 선택하여 통신환경을 설정하십시오.
(『[F2]: 시스템』 → 『2: 제어 파라미터』 → 『3: 시리얼 포트』)
통신환경은 부착하는 센서모듈의 통신설정을 확인 후 입력해야 합니다. 센서모듈의 통신설정은 부록을 참조하세요.
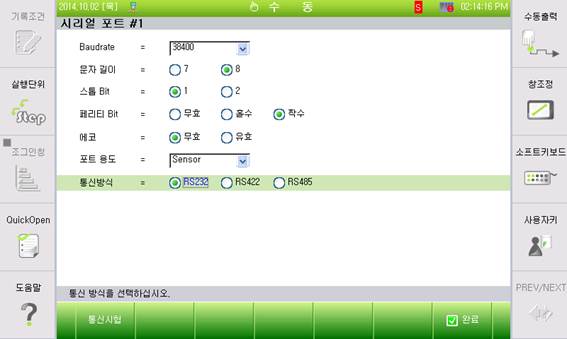
그림2.2 시리얼 포트 환경설정