4.2. 동기작업 프로그램 구성
4.2. 동기작업 프로그램 구성
n 원 위치 대기
로봇은 기동명령이 입력되기까지 원 위치에서 대기합니다.
n 인터록 대기
로봇은 동기 작업 구간 근처까지 미리 이동한 후, WaitSensor 명령어에 기록된 거리에 작업물이 도달하기까지 대기합니다.
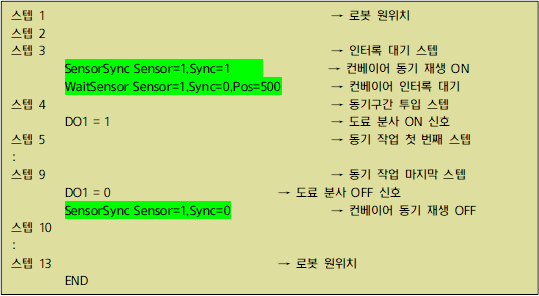
다음 그림은 컨베이어상에 흘러오는 작업물에 대한 도장작업 프로그램입니다. 로봇은 스텝 4로 진행할 때 컨베이어 동기를 시작하고 스텝 5로 이동할 때부터 동기 상태에서 작업물에 도료를 분사합니다. 여기서 인터록 대기 스텝(스텝3)은 동기작업 구간 진입 스텝(스텝 4) 근처에 기록합니다.

위 작업을 프로그램으로 작성하면 다음과 같습니다.
n 동기재생
그림에서 컨베이어 동기재생 구간은 스텝 4번부터 스텝 9번까지를 의미하는데,이 구간내의 모든 명령은 진행하는 컨베이어에 동기하며 실행합니다.
n 원위치복귀
작업을 끝낸 로봇은 다음 기동명령을 위해 다시 원위치로 복귀합니다.