4.4. 컨베이어 동기 해제를 적용한 티칭
4.4. 컨베이어 동기 해제를 적용한 티칭
최종 스텝까지 컨베이어 동기에 의해 동작하는 프로그램은 컨베이어 속도에 따라 최종 스텝에서 로봇의 위치가 다릅니다. 특히 컨베이어가 빠른 경우 최종 스텝에서 다음 사이클의 제 1 스텝으로 동작하기까지 시간이 오래 걸리며, 이로 인해 다음 사이클의 최종 스텝에서 그 위치가 더욱 하류로 이동하게 됩니다. 이런 현상은 매 사이클이 반복됨에 따라 누적되어 최종적으로 로봇이 소프트 리밋 에러의 발생에 의해 작업을 수행할 수 없는 상황이 발생합니다.
이런 현상을 피하기 위해 최종 스텝 앞에서 컨베이어 동기를 해제하여, 언제나 동일한 위치에서 로봇이 다음 사이클을 실행하도록 합니다.
n 티칭 예 1
다음은 컨베이어 동기해제를 사용한 프로그램의 예입니다.
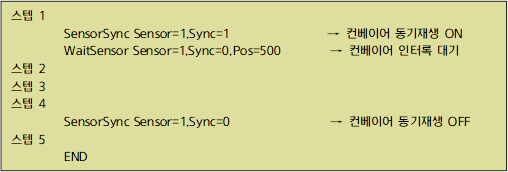
스텝 4에 컨베이어 동기재생 OFF 명령을 기록하면 스텝 5에서 로봇은 컨베이어에 동기하지 않고 스텝 5가 기록된 위치로 이동합니다. 즉, 로봇은 컨베이어와 무관하게 항상 일정한 위치(처음 스텝 5가 기록된 위치)에서 정지되며, 다음 사이클의 첫 번째 스텝으로 이동시간도 항상 일정합니다.
n 티칭 예 2
다음 그림과 같이 2개의 작업물이 올려져 있는 팔레트가 컨베이어 상을 이동하고 있을 때, 로봇이 작업물을 한 개씩 배출 shooter로 이동시키는 시스템에 대한 티칭법을 알아봅시다.

(1) 팔레트 위의 작업물 1을 컨베이어 동기하면서 잡습니다.
(2) 배출 shooter 위에 작업물 1을 놓습니다. 이때 배출 shooter는 컨베이어상에 있지 않으므로 컨베이어 동기가 해제되어야 합니다.
(3) 팔레트 위의 작업물 2를 컨베이어 동기하면서 잡습니다.
(4) 배출 shooter 위에 작업물 2을 놓습니다. 이때 배출 shooter는 컨베이어상에 있지 않으므로 컨베이어 동기가 해제되어야 합니다.
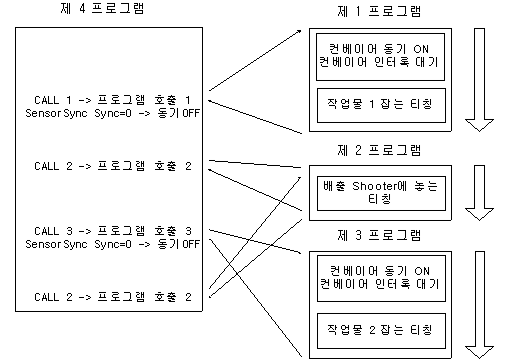
이러한 동작을 실행하는 경우 앞에서 설명한 블록 분할을 이용하면 편리한데 이에 대한 티칭 예는 다음과 같습니다.
이 시스템에서는 4개의 프로그램을 작성하여 사용합니다.
프로그램 1이 작업물 1을 잡는 티칭, 프로그램 2가 배출 shooter로 작업물을 운반하는 티칭, 프로그램 3이 작업물 2를 잡는 티칭, 그리고 프로그램 1,2,3은 프로그램 4에 의해 프로그램 호출(CALL)됩니다. 단, 프로그램 2를 호출하기 전에 컨베이어 동기 재생이 OFF 되어야 합니다.