10.4.7. HiNet변수
10.4.7. HiNet변수
협조 Network에 연결된 HiNet을 통해 변수 상태를 전달할 수 있습니다. 각 제어기는 협조로봇 간의 신호를 모니터링하고 있으며 공유로 설정되어 있는 부분을 I/O로 할당하여 자유롭게 입출력으로 사용할 수 있습니다. 각 제어기가 사용할 수 있는 Output 크기는 4byte입니다.
이 변수를 이용하면 로봇언어(HR-BASIC)을 이용하여 외부 인터록 신호 연결 없이도 협조제어 네트워크가 신호의 입출력 검출 등의 용도로 응용이 가능합니다.
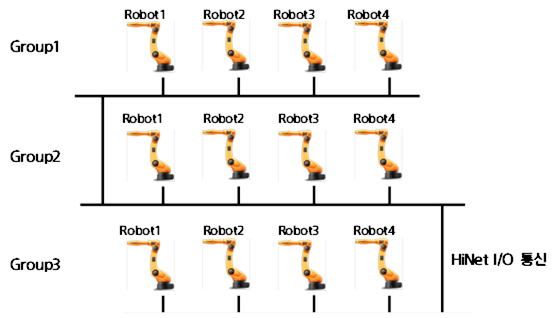
그림 10.4 협조 그룹/로봇과 HiNet I/O
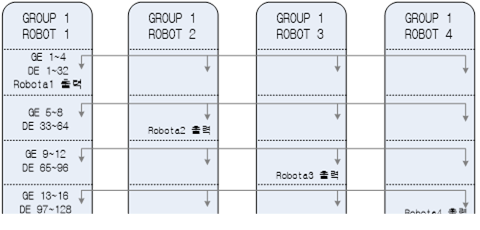
그림10.5 HiNet I/O 사용 예시(그룹 1번 – 로봇 4대)
표 10‑28 그룹번호, 로봇 번호에 따른 출력/입력 영역
그룹(G) 번호 로봇(R) 번호 | GE (OUT) | GE (IN) | DE (OUT) | DE (IN) |
출력 할당영역 | 입력 할당영역 | 출력 할당영역 | 입력 할당영역 | |
G# R# | {(G#-1)*4+(R#-1)}*4+1 ~ {(G#-1)*4+(R#-1)}*4+4 | 1~128 중 출력 할당영역을 제외한 영역 | {(G#-1)*4+(R#-1)}*32+1 ~ {(G#-1)*4+(R#-1)}*32+32 | 1~1024 중 출력 할당영역을 제외한 영역 |
G1 R1 | 1~4 | 5~128 | 1~32 | 33~1024 |
G1 R2 | 5~8 | 1~4, 9~128 | 33~64 | 1~32, 65~1024 |
G1 R3 | 9~12 | 1~9, 13~128 | 65~96 | 1~64, 97~1024 |
G1 R4 | 13~16 | 1~12, 17~128 | 97~128 | 1~96, 129~1024 |
(1) DE/DE[ ]명령어
DE 명령은 HiNet I/O 기능에 자신의 출력 영역에 1bit 단위로 접근하여 할당할 때 사용하는 변수 입니다.
DE[{첨자}]={파라미터} | |
첨자 | ․입출력 출력신호 지정 (1~1024) 0 : 모든 입출력 bit 선택 1~1024 : 해당 입출력 bit 선택 |
파라미터 | ․On/Off 설정 1 : On 0 : Off |
(2) GE/GE[ ]명령어
GE 명령은 HiNet I/O에 자신 출력 영역에 1byte 단위로 접근하여 할당할 때 사용하는 변수입니다. 자신을 포함한 모든 영역에 대해 1byte단위로 값을 읽을 수 있습니다.
GE[{첨자}]={파라미터} | |
첨자 | ․입력신호 그룹 지정(1~128) 0 : 모든 입출력 그룹 선택 1~128 : 해당 입출력 그룹 선택 |
파라미터 | ․1byte의 입출력 신호를 지정합니다.(0~255) |
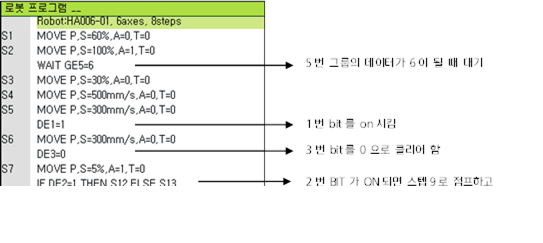
(3) 적용 예
로봇 언어로 적용되는 다양한 응용을 모두 예로 들어 설명할 수는 없지만 간단한 응용에 대한 예를 다음 화면에 표시합니다. DE와 GE는 변수로 사용이 가능한 I/O 이기 때문에 다양한 적용이 가능한 장점이 있습니다.