7.5.4. 시리얼 엔코더 리셋
7.5.4. 시리얼 엔코더 리셋
시리얼 엔코더 리셋은 모터의 에러 상태를 해제하거나 엔코더의 영점을 새로 맞추는 기능입니다. 엔코더 리셋을 실행하면 엔코더의 회전수가 0으로 클리어 됩니다.
시리얼 엔코더는 내부 메모리에 엔코더 회전 수 정보를 저장하고 있습니다. 엔코더 리셋은 초기화 작업에서 수행하며 로봇이 정상적으로 운용되고 있을 때는 절대 해서는 안됩니다. 다만 엔코더의 통신 이상 등 엔코더 관련 에러가 발생하거나 엔코더의 배터리가 소실되어 리셋해야 하는 경우에 실행합니다. 이때는 기존의 로봇 원점위치와 달라질 수 있으므로 로봇 프로그램의 실제 위치를 확인하여 수정하는 작업이 필요합니다.
시리얼 엔코더 리셋은 각 축별로 엔코더 리셋 모드를 설정하여 실행할 수 있습니다. 엔코더 회전수 클리어를 하지 않고 엔코더 관련 에러만 해제하고자 할 경우 엔코더 리셋 모드를 ‘에러해제’로 설정한 후 실행합니다.
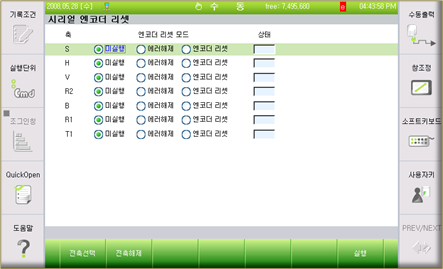
그림 7.84 시리얼엔코더 리셋

l 시리얼 엔코더는 제어기 전원이 없는 상태에서도 위치를 기억하기 위해서 엔코더용 배터리가 부착되어 있습니다. 만일 제어기 전원과 엔코더 배터리 전원이 모두 공급되지 않으면 엔코더의 위치정보가 손실되므로 로봇의 작업프로그램을 사용하는데 문제가 발생할 수 있습니다.
l 따라서 엔코더 배터리 전압에러가 발생하는 경우에 엔코더 배터리를 교체는 반드시 제어기 전원이 ON되어 있는 상태에서 해야 합니다.