3.5.2. 허용 토크, 관성 모멘트 계산 예 (HA006B Case)
3.5.2. 허용 토크, 관성 모멘트 계산 예 (HA006B Case)
[그림3.7, 3.8]은 취부되는 부하가 질점에 있다고 생각되는 경우에 그 질점이 위치할 수 있는 곳의 가능한 범위를 표시합니다. 그렇지만, 실제 부하(End Effector)가 질점에 있는 경우는 거의 없으므로 각 축의 관성모멘트를 구하여 평가하여 주십시오. 취부되는 부하를 질점으로 생각할 경우의 예를 들어보면,
(예)로봇형식은【HA006B】이고 취부되는 부하의 중량이5.74Kg일 때

그림 3.7 2차원 부하 모델
M - 부하 중량
JXX - 부하 무게 중심에서 X축 방향의 관성 모멘트
JYY - 부하 무게 중심에서 Y축 방향의 관성 모멘트
JZZ - 부하 무게 중심에서 Z축 방향의 관성 모멘트
Ja4 - R2축 회전 중심에서의 관성 모멘트
Ja5 - B축 회전 중심에서의 관성 모멘트
Ja6 - R1축 회전 중심에서의 관성 모멘트
☞ 부하조건: 가로 100mm, 세로100mm, 두께 200mm 의 알루미늄 블록(Mass 5.74kg)
① 허용 토크 제한
B축 기준 무게 중심 위치 LX = 155mm, LY = 0mm, LZ = -25.5mm
토크맵에서B, R1축 거리 제한을 적용하면 아래와 같습니다.
B축 기준 
R1축 기준 
② 허용 관성 모멘트 제한
무게중심에서 부하의 관성 모멘트 JXX=0.024kgm2, JYY=0.01kgm2, JZZ=0.024kgm2
B축 관성 모멘트 (Ja5)

R1축 관성 모멘트 (Ja6)

③ 결론 : 중량, 토크, 관성모멘트 조건 모두 제한 조건을 만족하므로 안전합니다.
n R1축 중심에서의 허용중심위치
① 허용토크에서 보았을 때의 허용중심위치
LR1 ≤ (허용토크) / (부하중량)
LR1 = 5.9 N·m / (5.74Kg×9.8 m/s2) = 0.104 m
② 허용관성모멘트에서 보았을 때의 허용중심위치
LR1 ≤ (허용관성모멘트/부하중량 )1/2
= (0.06 kg·m2 / 5.74kg)1/2 = 0.102 m
이상의 결과에서 R1축 중심에서의 거리는 허용 토크에 의해 규제되고, 0.102 m 이내가 됩니다.
n B축 중심에서의 허용중심위치
(본 로봇은 B축 중심이 같은 축 상에 있고, 또한 허용 부하 토크, 허용 관성 모멘트도 B축, R2축이 같은 값입니다. 따라서 B축의 허용조건을 만족하면, R2축의 허용조건도 만족하게 됩니다.)
① 허용토크에서 보았을 때의 허용중심위치
LB ≤ (허용토크) / (부하중량)
LB = 9.8 N·m / (5.74Kg×9.8 m/s2) = 0.174 m
② 허용관성모멘트에서 보았을 때의 허용중심위치
LB ≤ (허용관성모멘트/부하중량 )1/2
= (0.27 kg·m2 / 5.74kg)1/2 = 0.217 m
이상의 결과에서 B축 중심에서의 거리는 허용 토크에 의해 규제되고, 0.174m 이내가 됩니다.
n Torque Map
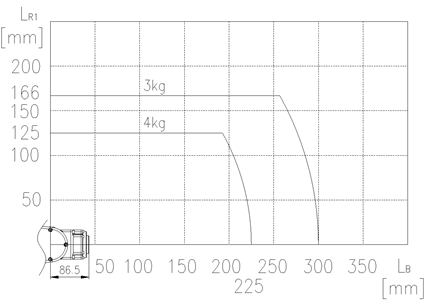
그림 3.8 손목축 토크 선도