3.6.1. 허용 부하 토크 산정
3.6.1. 허용 부하 토크 산정
로봇의 손목축 선단에 부착될 부하는 허용 중량, 허용 부하토크, 허용 관성 모멘트에 의해서 규제 됩니다.
[그림 3.8]을 참고하여 부하가 허용조건을 초과하지 않도록 사용하여 주십시오.
n Step 1 (허용 중량)
로봇의 설계 사양에 있는 허용 중량 이하인지 확인
n Step 2 (허용 부하토크)
팔레타이징 로봇의 특성상 손목축에서의 unbalance torque가 존재하지 않으므로, 허용 부하토크는 부하 산정 시 고려대상에서 제외
n Step 3 (허용 관성 모멘트)
손목축 중심에서 부하의 관성 모멘트 값을 계산 (JR2)
JR2- R2축 회전 중심에서의 관성 모멘트
관성 모멘트 값이 제한 값 이하인지 확인
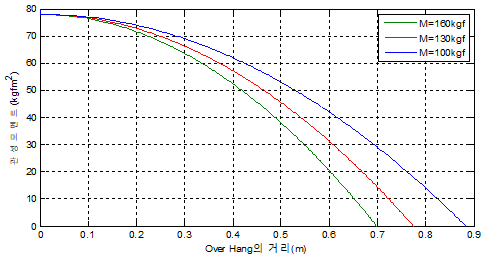
그림 3.8 손목축 부하조건
 허용 관성모멘트
허용 관성모멘트
표 3‑1 손목축 부하
로봇 모델 | R2축 회전 | ||
허용 중량 | 허용 토크 | 허용 관성 모멘트 | |
HP160 | 160 kgf | - | 78kgfm2 |