3.6.2. 허용 관성 모멘트 산정
3.6.2. 허용 관성 모멘트 산정
[그림 3.8]을 참고하여 부하가 허용조건을 초과하지 않도록 사용하여 주십시오.
n Step 1
각 손목축 중심에서 부하의 관성 모멘트 값을 계산 (Ja4, Ja5, Ja6)
Ja4 - R2축 회전 중심에서의 관성 모멘트
Ja5 - B축 회전 중심에서의 관성 모멘트
Ja6 - R1축 회전중심에서의 관성 모멘트
n Step 2
이너셔맵을 기준으로 정부하 토크에서의 관성 모멘트 값이 제한 값 이하인지 확인
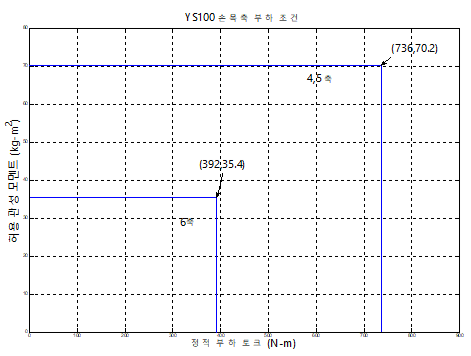
그림 3.8 손목 축 부하조건
 허용 관성모멘트
허용 관성모멘트
표 3‑2 허용 관성 모멘트
로봇 모델 | 허용 관성 모멘트 | ||
R2축 회전 | B축 회전 | R1축 회전 | |
YS100 | 70.2kg·m²(7.2kgf·m·s²) | 35.4kg·m²(3.6kgf·m·s²) | |