6.1.20.2. 원인및점검방법
6.1.20.2. 원인및점검방법
(1) 보드와 서보보드가 올바로 설치되어 있는지 점검하십시오. n 보드가 올바르게 설치되어 있는지 점검하십시오. n 보드 이상여부를 점검하십시오.
(2) 로봇이 급격하게 동작하는 작업 프로그램이 있는지 점검하십시오. |
(1) 메인보드와 서보보드가 올바르게 설치되어 있는지 점검하십시오.
메인보드와 서보보드가 랙에 올바로 설치되어 있지 않거나 보드에 문제가 있으면 통신에 문제가 되어 에러가 발생할 수 있습니다.

USB 메모리에 메인보드 파일을 백업하는 방법은 다음과 같습니다.

그림 6.108 TP에 USB 삽입하는 방법
USB가 TP에서 인식되면 화면 위에 다음과 같은 아이콘으로 표시됩니다.

파일을 백업하기 위해서,
Ø 서비스
Ø 5. 파일관리
로 들어가면 윈도우에서 탐색기와 같은 화면이 보여집니다.
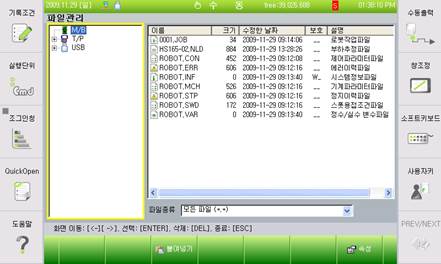
여기서 M/B에 보여지는 파일을 복사하여 USB에 넣으시면 됩니다.
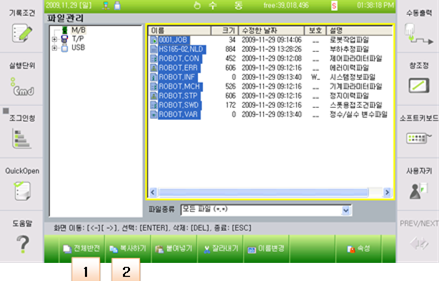
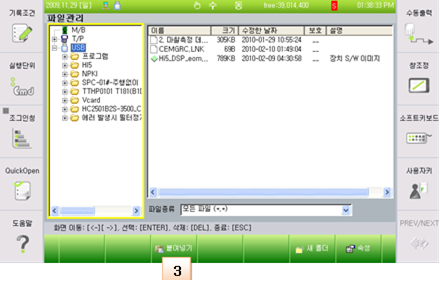
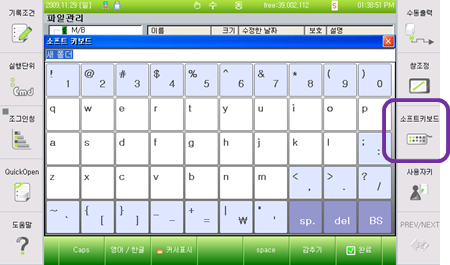
USB에 윈도우 탐색기와 같이 새 폴더를 만들 수도 있으며, 소프트키보드를 사용하여 폴더 이름을 변경할 수 도 있습니다.

n 보드가 올바르게 설치되어 있는지 점검하십시오.
메인보드와 서보보드를 랙에서 제거한 후 다시 설치하시기 바랍니다.
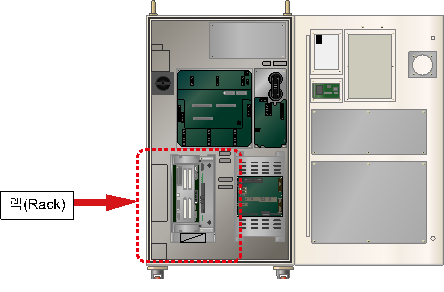
그림 6.109 제어기 내부 랙 위치
n 보드 이상여부를 점검하십시오.
보드 이상 여부를 판단하기 위해서 보드 교체를 하시기 바랍니다.
(2) 로봇이 급격하게 동작하는 작업 프로그램이 있는지 점검하십시오.
로봇 동작 중 급격하게 모션이 변하는 구간에서 에러가 발생하는지 확인하십시오.
만약, 급격한 모션 중에 에러가 발생한다면 작업 프로그램의 수정이 필요합니다.
급격한 모션에서 에러가 발생하는 원인은 다음과 같습니다. 작업 프로그램을 수행할 때 짧은 구간을 이동하면서 불가피하게 로봇의 자세가 많이 틀어지는 경우가 있습니다. 이 때, 로봇의 축 속도가 갑자기 높아지게 되고 이를 서보보드에서 추종하지 못할 경우 에러가 발생하게 됩니다. 해결하는 방법은 자세가 급격히 변하는 지점의 티칭 포인트를 수정하거나 로봇 자세를 바꾸어 주면 됩니다.