6.1.21.2. 원인및점검방법
6.1.21.2. 원인및점검방법
(1) 툴 데이터가 정확히 입력되어 있는지 확인하십시오.
(2) 로봇 자세가 특이점 근방인지 확인하십시오.
(3) 부가축은 가감속 파라미터 설정값과 동작중 부하율을 확인하십시오.
(4) 작업 프로그램을 조정하십시오. |
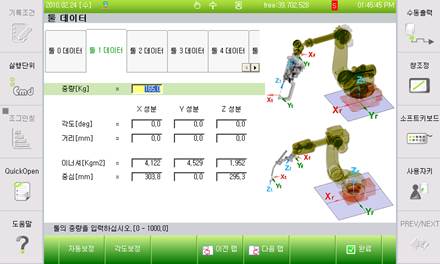
(1) 툴 데이터가 정확히 입력되어 있는지 확인하십시오.
툴 중량이나 이너셔가 제어기에 등록되어 있는 값과 크게 다르면 로봇 제어 성능이 악화되면서 최고속 초과에러가 발생할 수 있습니다. 툴중량과 이너셔는 아래 메뉴에서 툴 번호에 따라 등록할 수 있습니다.
Ø 시스템
Ø 3. 로봇 파라미터
Ø 툴 데이터
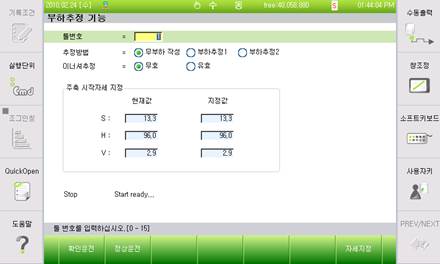
툴 중량이나 이너셔를 자동으로 설정하기 위해서는 아래의 메뉴에서 부하추정 기능을 사용할 수 있습니다.
Ø 시스템
Ø 자동정수 설정
Ø 4. 부하추정 기능
(2) 로봇 자세가 특이점 근방인지 확인하십시오.
특이점 근방의 자세에서 PtP 보간이 아닌 L 보간이나 C 보간을 실행하면 에러가 발생할 수 있습니다. 특이점은 B축이 0deg에 가까운 경우와 손목부 중심이 S축 회전 중심축과 가까울 때 발생합니다.특이점 근방을 지나야 할 때에는 해당 스텝을 PtP 보간으로 변경하여 주십시오.
|
|
그림 6.110 B축 특이점 | 그림 6.111 S축 특이점 |


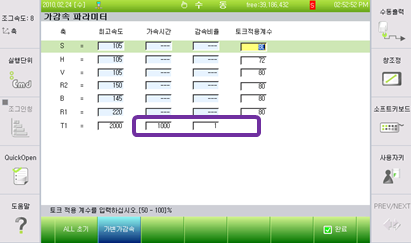
(3) 부가축은 가감속 파라미터 설정값과 동작중 부하율을 확인하십시오.
부가축 가감속 파라미터의 최고속이 너무 높거나 가속시간이 너무 짧아서 모터토크가 부족할 수 있습니다. 로봇 동작중 부하율을 관찰하면서 I/Ip 최고속을 낮추거나 가속시간을 크게 조정해야 합니다.
Ø 시스템
Ø 3. 로봇 파라미터
Ø 34. 가감속 파라미터
에서 부가축의 가감속 파라미터를 수정할 수 있습니다.
(4) 작업 프로그램을 조정하십시오.
작업 프로그램의 해당 스텝 혹은 직전 스텝의 스텝 조건을 변경하십시오. 첫 번째로 “Acc=0”으로 변경해 보고, 두 번째는 스텝의 속도를 낮춰 보고, 세 번째는 이동 경로에 스텝을 하나 추가해 보는 방식으로 프로그램의 조건을 변경하십시오.