6.1.23.2. 원인및점검방법
6.1.23.2. 원인및점검방법
(1) 엔코더 공급전압을 확인하십시오
(2) 서보보드를 교체 시험하십시오
(3) 모터를 교체 시험하십시오
(4) 배선을 점검하십시오
(5) 조치 완료후 배선의 통신상태를 점검하십시오 |
(1) 엔코더 공급전압을 확인하십시오.
엔코더에 공급하는 전원전압은 엔코더측 커넥터 공급 전압이 5V±5% (4.75V ~ 5.25V)범위 내에 있어야 합니다. 엔코더측 커넥터 전압이 4.75V이하로 떨어질 경우, 엔코더가 정상 동작하지 않아, 상기 에러 발생 가능성이 있습니다.
엔코더측 커넥터 pin(3-4)의 전압을 측정해 주십시오.
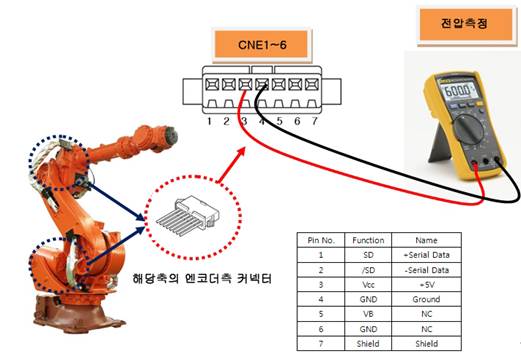
측정된 전압이 기준전압보다 낮을 경우 엔코더 전원공급장치의 +5V ADJ(E)전압조정 단자를 돌려 엔코더측 커넥터 전압이 기준전압 이내가 되도록 조정하십시오.

(2) 서보보드를 교체 시험하십시오.
서보 보드를 교체한 후 에러가 발생하지 않으면 서보보드의 불량입니다.서보 보드를 정상품으로 교체하여 주십시오.
(3) 모터를 교체 시험하십시오.
서보 모터를 교체한 후 에러가 발생하지 않으면 서보모터의 불량입니다.서보 모터를 정상품으로 교체하여 주십시오. 아래 그림은HS165 로봇의 각 축 모터의 위치를 나타내고 있으며, 다른 로봇은 해당 기구 보수설명서를 참고하여 교체하시기 바랍니다.
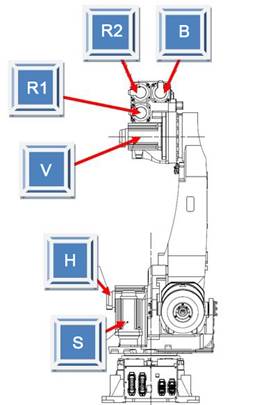
그림 6.116 HS165 로봇의 각 축 모터 위치
(4) 배선을 점검하십시오.
엔코더의 배선점검 순서는 다음과 같습니다.
1차: 엔코더 배선에 관련된 커넥터들의 접촉 불량여부를 점검하십시오.
2차:
엔코더 배선의 단락 유무를 점검하십시오. 멀티미터(테스터기)와 같은 장비를 이용하여 각 상의 배선을 1:1로 체크하십시오.
3차: 엔코더 배선을 교체시험 하십시오.
엔코더 배선이 단선되지 않고 쉴드선의 접촉불량, 엔코더 신호선과 타 전력선 또는 로봇 본체 금속부위와의 접촉 등의 현상이 있을 경우에는 단락유무 검사로는 검사할 수 없으므로 배선교체 시험을 하여주십시오.
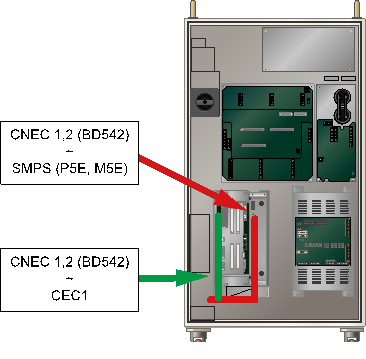
n 제어기 내부 배선을 점검하십시오.
CNEC1,2(BD542)커넥터와SMPS(P5E, M5E)간의 배선을 점검하십시오.
CNEC1,2(BD542)커넥터와CEC1간의 배선을 점검하십시오.
n 제어기와 로봇간의 배선을 점검하십시오.
CNEC1와 CER1간의 배선을 점검하십시오.
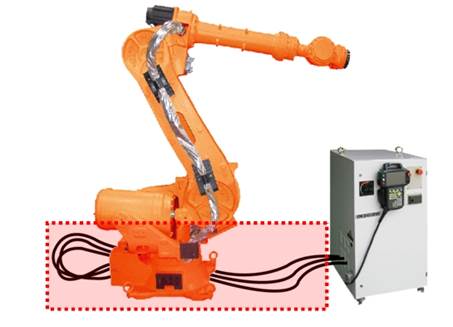
그림 6.117 로봇과 제어기간 기본 설치 구성도
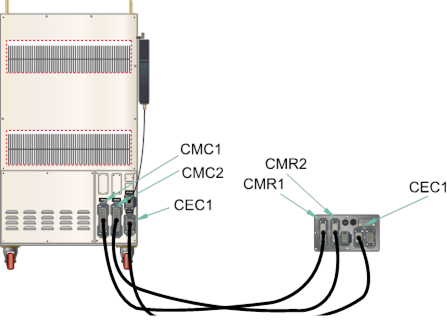
그림 6.118 로봇 본체와 제어기의 접속
n 본체내부의 배선을 점검하십시오.
CER1과 CNE1~6(엔코더측 커넥터)간의 배선을 점검하십시오.
배선점검은 로봇 보수설명서의 배선 접속도를 참고하시기 바랍니다.
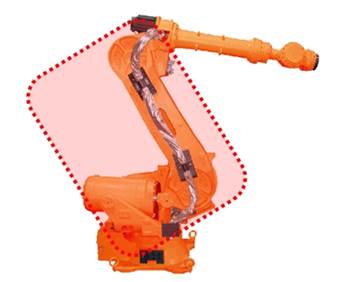
그림 6.119 로봇 기내 배선
(5) 조치 완료후 배선의 통신상태를 점검하십시오.
문제부분의 조치가 완료된후 『엔코더 통신실패 횟수 표시 기능 메뉴얼』을 참고하여 통신상태를 점검 하십시오.
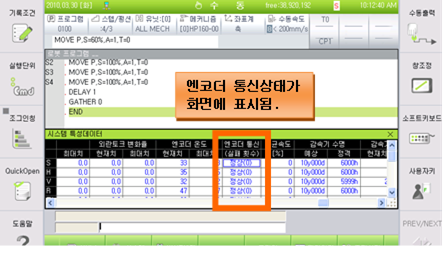
통신 실패 횟수 | 엔코더 상태 | 내용 |
0~2 | 정상 | 정상상태. |
3~5 | 점검 | 배선, 엔코더 또는 보드 점검 필요. |
6~8 | 경고 | 심각한 상태, 로봇이 정지할 수 있음. |