4. 재기동(RESTART)
Arc용접 진행 중에는 Arc 꺼짐, 용접 전류 및 전압의 제한치 초과, 가스 압력 저하, 와이어 부족, 냉각수 에러 등으로 인해 용접이 중단될 수 있습니다. 이 때 용접이 정지된 지점에서 다시 용접을 시작하면 용접이 안된 부분이 발생할 수 있습니다. 재기동 기능은 이러한 경우 용접이 수행되지 않은 부분을 보완하기 위해 오버랩하여 용접을 수행하는 기능입니다.
재기동 조건설정에서는 Arc 꺼짐 등 특정 원인에 의해 용접이 중단된 후 재기동 할 때 재기동 방법 대해 설정합니다. 용접이 중단된 이후 별도의 조치 없이도 용접작업을 자동으로 재기동하거나 중단 원인을 제거한 후 다시 기동하면 일정 거리만큼 용접선을 따라 역방향으로 이동한 후 용접을 시작합니다. 결과적으로 에러가 발생하여 용접이 중단된 위치 근처에서는 용접 수행이 중복되는 오버랩 구간이 생기게 됩니다. 이를 통하여 용접 중단 후 재기동을 할 때 용접이 안된 부분이 생기는 것을 막을 수 있습니다.
Restart(재기동) 기능은 용접보조조건 대화장자에서 설정한 내용에 따라 실행됩니다.
용접 중 Arc 꺼짐, 제한치 초과, 가스 압력 저하, 와이어 부족, 냉각수 에러 가 발생한 경우 재기동 방법은 다음과 같습니다.
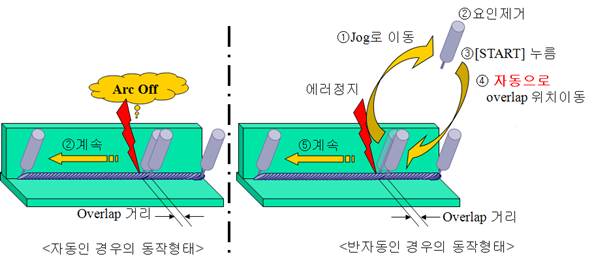
그림 4.1 Restart 기능 예시 (반자동)
l 금지
오버랩을 금지하는 설정입니다. Arc 꺼짐, 제한치 초과, 가스 압력 저하, 와이어 부족, 냉각수 에러가 발생할 경우 용접이 중단되고 로봇 본체도 정지합니다. 이후 원인 제거 후 [기동]을 누르면 오버랩 동작을 하지 않고 로봇이 정지한 위치에서 용접을 시작하고 진행됩니다.
l 무시
에러를 무시하는 설정입니다. 해당 설정을 활성화하면 용접 중단 후 로봇이 정지하지 않고 계속 진행합니다. 즉 Arc가 꺼지거나 제한치를 초과해도 무시하고 계속 진행됩니다. 이 처리 방법은Arc 꺼짐, 제한치 초과의 원인으로 용접이 중단 후 재기동하는 경우에만 가능합니다.
l 반 자동
사용자에 의해 오버랩을 수행하는 설정 입니다. Arc 꺼짐, 제한치 초과, 가스 압력 저하, 와이어 부족, 냉각수 에러가 발생할 경우 용접이 중단되고 로봇 본체도 정지합니다. 이후 원인 제거 후 사용자가 [기동]을 누르면 용접보조조건의 재기동 항목에 설정된 방법으로 오버랩 용접을 수행한 후 본 작업을 진행합니다.
이때 로봇을 조그동작을 통하여 다른 위치로 이동시킨 후 [기동]을 누르면 오버랩 용접위치로 바로 이동 후 용접을 수행합니다.

주의사항
로봇 이동 시 스텝 전/후진키를 누르면 재기동 정보가 클리어 되어 오버랩이 수행되지 않습니다. 반드시 조그 동작으로만 이동하십시오.
l 자동
자동으로 오버랩을 수행하는 설정입니다. 해당 설정은 Arc 꺼짐에 의해 용접이 중단된 경우에만 설정할 수 있습니다. 용접 중 Arc 꺼짐이 발생한 경우 정지하지 않고 용접보조조건의 재기동 항목에 설정된 방법으로 오버랩 용접을 수행한 후 본 작업을 진행합니다. 단, 오버랩 구간 용접 중 다시 Arc가 꺼지는 경우는 그 위치에서 바로 용접을 시작합니다.
각 처리방법에 대한 상세한 내용은 [14.5 용접보조조건– 재시도, 재기동]을 참고하여 주십시오.