2.2. 유닛 설정
2.2. 유닛 설정
유닛이란 작업 프로그램 실행 시 제어할 메커니즘을 결정하는 것으로 이에 대한 자세한 내용은 별도의 Hi5 제어기 사용자 설명서를 참고하십시오.
본 기능을 사용하기 위해서는 로봇의 작업 프로그램과 독립적으로 로봇이 아닌 다른 메커니즘을 갖는 작업 프로그램이 실행되어야 하기 때문에 유닛 설정은 반드시 필요합니다
예를 들어 유닛 0으로 작성된 MOVE 명령문을 실행하면 로봇과 G1, G2, P1가 동시에 지정된 목표위치에 도달하며, 유닛 1로 작성된 MOVE 명령문을 실행하면 로봇만 지정된 목표위치에 도달합니다.
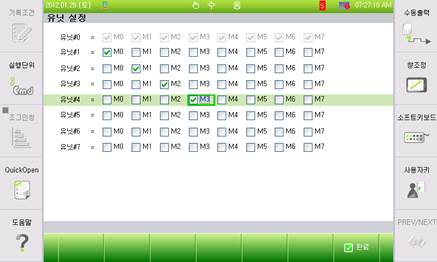
[시스템/초기화/유닛 설정] 화면에서 하기와 같이 설정합니다.