2.3.2. 2대 이상의 공통 좌표계 설정
2.3.2. 2대 이상의 공통 좌표계 설정
협조 로봇의 공통 좌표계는 로봇간의 동일점을 티칭하여야 하므로 협조하는 모든 로봇이 동일한 3점을 가리킬 수 있도록 하여야 합니다. 따라서 로봇간의 거리가 많이 떨어져 있는 경우에는 공통 좌표계의 설정이 불가능합니다. 이때는 별도의 툴(Tool)을 제작하여 로봇간의 동일점을 티칭 할 수 있도록 하여야 합니다.
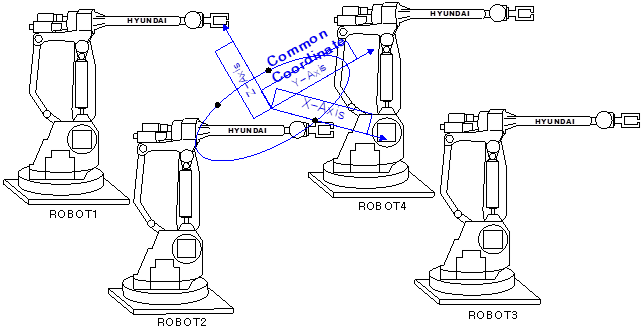
그림 2.3 2대 이상의 공통 좌표계 설정
주의사항
l 공통 좌표계 설정 이전에 로봇의 캘리브레이션 (자동정수 설정)을 먼저 수행하여야 합니다.