2.3.4. 공통 좌표계 설정
2.3.4. 공통 좌표계 설정
공통 좌표계의 설정은 협조 로봇의 툴 선단의 위치를 정확히 알고 있어야 가능합니다. 이때는 로봇의 캘리브레이션을 해 주어야 합니다. Hi5 제어기는 3차원 위치 측정기가 없는 경우에 축 정수 및 툴 길이 캘리브레이션 기능인 자동정수설정(『[F2]:시스템』 → 『6: 자동정수 설정』 → 『1: 축 정수 및 툴길이 최적화』) 기능을 제공하고 있습니다. 3차원 위치 측정기를 보유하고 있다면 정확한 기구 학 캘리브레이션이 가능합니다. 『9: 로봇과 툴 캘리브레이션』을 이용하십시오.
자세한 내용은『Hi5제어기 조작설명서』를 참고하십시오. 가능한 정교한 자동정수 설정 후에 공통 좌표계 설정을 하십시오.
공통 좌표계 설정을Robot1, Robot2 로봇 두 대의 환경에서 설명합니다.
n 티칭방법
① Robot1과 Robot2에 해당하는 제어기에 기록할 프로그램 번호를 선택합니다.
② Robot1과 Robot2를 각각 조그로 조작하여 가능한 큰 삼각형을 생성하도록 3점을 스텝 1,2,3에 순차적으로 기록합니다.


Robot1 Robot2
이때 기록위치는 공간상에 동일한 위치에 기록되며 보간 방식과, 속도는 무관하나 툴 번호는 공통 좌표 계 설정 시 시용했던 툴을 선택합니다.
주의사항
l 공통좌표계 설정용 툴 데이터 값은 정확한 툴의 규격을 입력하거나 자동정수 설정을 통해 툴 데이터 값을 구하여 사용하십시오.
l 각 점은 로봇의 자세를 동일하게 기록하는 것이 바람직합니다.
l 설정한 3점이 가능한 큰 삼각형을 생성하도록 티칭하여 기록하십시오. 점 사이의 거리가 가깝거나, 3점이 거의 직선에 가까운 경우에는 에러가 발생합니다.
l 공통 좌표계가 설정되어 있지 않으면 수동 협조 조그조작이나 협조 재생이 불가합니다.
l 협조 로봇간의 공통 좌표계 설정이 올바르게 되었는지 협조 조그 동작을 통해 확인 후에 본격적인 작업을 하는 것이 바람직합니다.
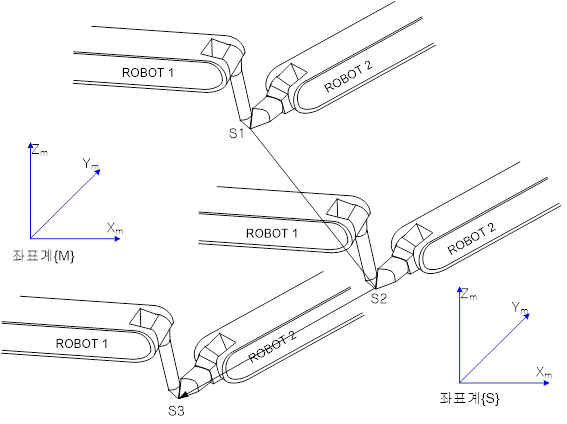
그림 2.5 공통 좌표계 설정 티칭 방법
③ 각각의 로봇(ROBOT1,2)에서 협조 좌표계 설정을 실행합니다.
④ 수동 모드에서 『[F2]: 시스템』 → 『6: 자동정수 설정』을 선택합니다.
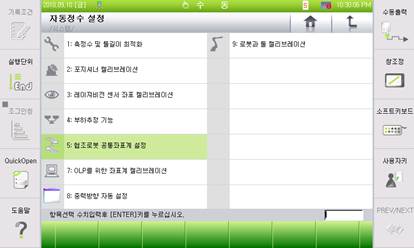
⑤ 『5: 협조로봇 공통 좌표계 설정』을 선택합니다.
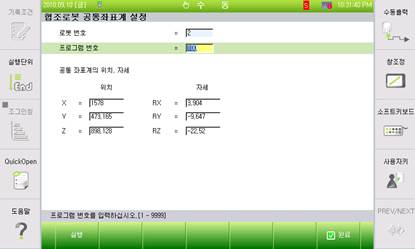
※ 상기의 파라미터의 의미는 다음과 같습니다.
n 로봇 번호: 협조제어 파라미터에서 설정한 로봇 번호
n 프로그램 번호: 협조로봇 좌표계 등록을 위한 프로그램 번호
⑥ 『[F1]: 실행』키를 누릅니다. 실행 결과는 로봇 베이스에서 본 공통좌표계의 위치와 자세가 표시됩니다. 상대위치를 X, Y, Z 로, 자세를 Rx, Ry, Rz로 표시합니다.
⑦ 『[F7]: 완료』키를 누르면 설정이 완료됩니다.