3.3. 수동모드 협조조작
3.3. 수동모드 협조조작
n MASTER 로봇과SLAVE 로봇의 설정
설정한 사용자 키(혹은R351, R352 코드)를 이용하여 로봇 역할을MASTER와 SLAVE로 설정합니다. 이때 로봇의 역할은 로봇번호와는 무관합니다.
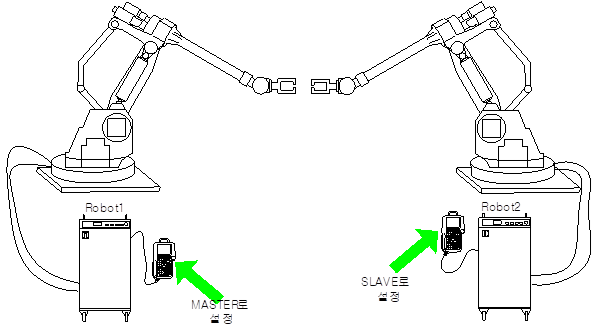
그림 3.1 수동모드 협조조작(Master 로봇과 Slave 로봇의 설정)
① MASTER 로봇과 SLAVE 로봇이 모두 ‘수동모드’인지 확인합니다.
② MASTER와 SLAVE 로봇을 모두 운전준비 ON 상태에 놓습니다.
③ SLAVE 로봇의 ENABLE 스위치를 잡아 운전준비 ON이 유지되도록 되도록 하고 MASTER 로봇도 운전준비 ON 되어 있는지 확인합니다.
④ MASTER 로봇을 조작하면 SLAVE 로봇은 상대 위치를 추종하여 움직입니다.
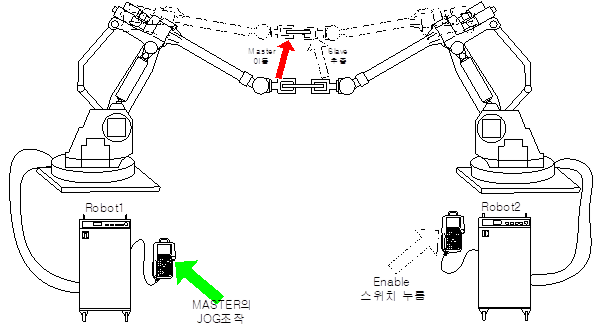
그림 3.2 수동모드 협조조작(Master 로봇 조작/Slave 로봇 추종)
주의사항
l 다음과 같은 경우에는 수동 협조 JOG가 불가능합니다.
① MASTER를 두 개 이상 지정하여 조작하는 경우
② SLAVE로 설정된 로봇을 조작하는 경우
③ MASTER혹은 SLAVE의Enable 스위치를 누르고 있지 않은 경우
④ 로봇간 협조 좌표계 설정이 되지 않은 경우
l 수동모드 협조기능 시에 SLAVE로 설정한 로봇에서는 JOG가 불가합니다. SLAVE의 JOG를 위해서는 로봇의 역할을 Indiv.로 변경하여 사용하십시오.
l 협조제어가 <무효>인 경우에 수동모드의 화면 상단에 I:R#/S:R#/M:R#의 표시가 되지 않고 설정도 되지 않습니다. 따라서 수동 협조 JOG도 불가능합니다.