3.5. CMOV 기록모드 조그 (SLAVE)
3.5. CMOV 기록모드 조그 (SLAVE)
(1) CMOV기록 모드는 지그리스 협조 동작을 위해 슬래이브의 위치를 티칭하는 모드입니다.
(2) CMOV기록 모드로 설정하기 위해서는 로봇역할을 슬래이브(SLAVE)로 선택합니다.
(R 351,2 코드를 입력한 후 협조상태 변환 사용자 키를 할당하여 SHIFT+사용자 키로 로봇역할을 변경합니다. 화면 우측 상단에 역상으로 S: R2 와 같이 로봇역할과 번호가 표시됩니다.)
(3) 마스터 로봇을 수동 협조 상태를 MASTER로 놓습니다. (R351,1)
(4) 직교좌표계 조그 상태에서 조작하면 아래의 그림과 같이 마스터의 툴 엔드이펙터 좌표계 기준으로 직교 좌표 조그가 이루어집니다.
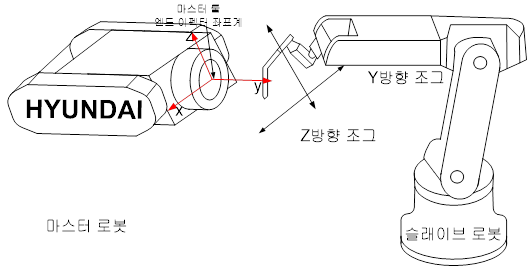
그림 3.4 CMOV 기록모드 조그
주의사항
l 슬래이브가 CMOV기록 모드일 때는 수동 협조 상태가 MASTER로 설정된 로봇의 조그 조작은 불가합니다.