2.3. 롤러헤밍 가압력제어 기능 셋팅 순서
2.3. 롤러헤밍 가압력제어 기능 셋팅 순서
(1) 먼저 기능사용을 위해 [시스템]-[응용 파라미터]-[롤러 헤밍 가압력제어]-[기능 사용]에서 기능사용을 ‘유효’로 설정합니다.
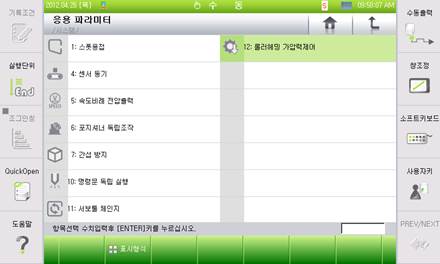
그림 2.1 롤러헤밍 가압력제어 메뉴
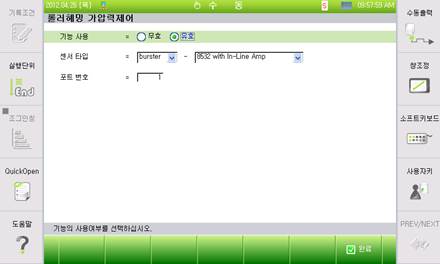
그림 2.2 롤러헤밍 가압력제어 유효 설정 화면
(2) 롤러헤밍 툴에 부착된 로드셀이 burster社에서 제조한 ‘앰프가 있는 8532-6005’인지 확인합니다. 또한 [시스템]-[응용 파라미터]-[롤러 헤밍 가압력제어]-[센서 타입]에서 동일한 센서를 선택합니다.
(3) 로드셀의 아날로그 출력신호를 제어기에서 받기 위해 아날로그보드(아크보드, BD584V30)를 사용합니다. 로드셀의 출력이 아날로그 입력포트 1에 연결됐는지 확인합니다. 또한 [시스템]-[응용 파라미터]-[롤러 헤밍 가압력제어]-[포트 번호]에서 입력포트를 1로 설정합니다.
(4) 로드셀에 전원이 공급되고, 제어기 아날로그 입력포트에 로드셀이 연결되면 제어기에서 가압력 정보를 받을 수 있습니다. 로드셀에 가해지는 압력을 바꿔가며 T/P에 표시되는 값에 문제가 없는지 확인합니다.
(5) 로봇은 가압력을 제어하기 위해 현재 활성화된 툴좌표계의 Z 방향으로 움직입니다. 따라서 롤러별로 툴 좌표계가 올바르게 정의되어 있는지 확인해야 합니다.
(6) 마지막으로 롤러헤밍 툴에 외부와 접촉하지 않은 상태에서 센서 초기화를 해야 합니다. 초기화를 위해 [서비스]-[모니터링]-[롤러헤밍 데이터]를 선택한 후(롤러헤밍 데이터 모니터링 창에 포커스가 있을 때) [F5: 초기화]를 누르면 대화상자가 나타납니다. 센서 초기화 화면은 다음 그림과 같습니다.

그림 2.3 로드셀 초기화 화면
(7) G/P(Graphic Pannel)에 롤러헤밍 가압력의 실시간 표시를 위해서는SW195로 정의하여 사용합니다. (단위: [N])
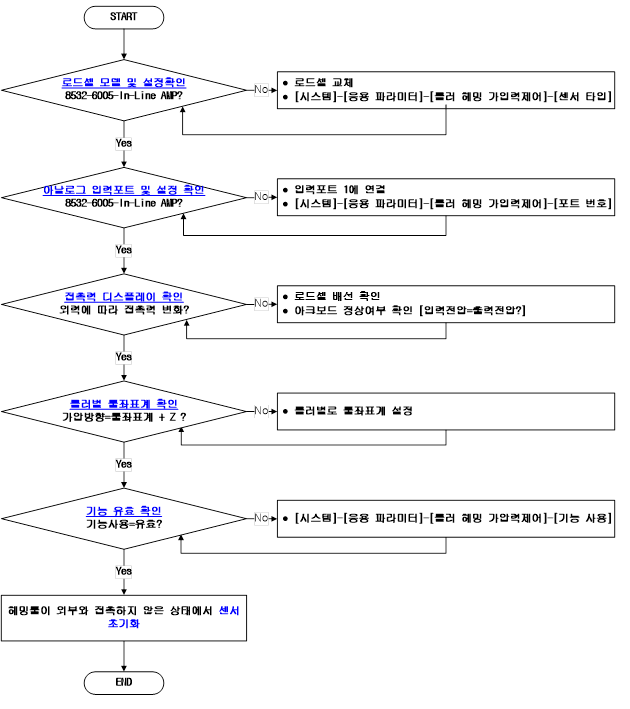
그림 2.4 기능사용 전 셋팅 순서