2.1.1. 로봇타입 및 부가축 수 설정
2.1.1. 로봇타입 및 부가축 수 설정
(1) 엔지니어 코드(R314)를 입력하십시오.
(2) 수동 모드에서 『[F2]: 시스템』 → 『5: 초기화』 → 『2: 로봇 타입 선택』을 선택합니다.
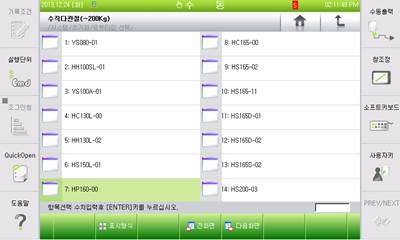
그림 2.1 로봇 타입 선택
(3) 수동 모드에서 『[F2]: 시스템』 → 『5: 초기화』 → 『2: 로봇 타입 선택』을 선택한 후, 부가축 수를 설정합니다. 사용할 부가축수를 입력하고 『[F7]: 실행』키를 누르면 안내프레임에 다음의 메시지가 표시됩니다.

그림 2.2 부가축 수 입력
(4) 『Yes』키를 누르면 『작성할까요? [Yes]/[No]』의 메시지가 표시됩니다. [부가축 정수를 설정할까요?] 라는 물음에 [ENTER]를 누르고 부가축 파라미터를 설정합니다.
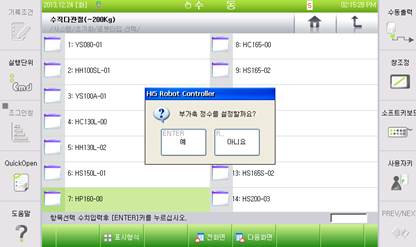
그림 2.3 부가축 파라미터 설정메뉴 진입
(5) 부가축 정수 설정에서 축 사양 및 축위치, 감속비, 소프트리밋 범위, AMP사양등을 설정합니다.
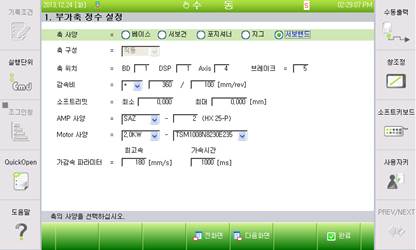
그림 2.4 부가축 파라미터 설정