2.1.2. 부가축 정수 설정
2.1.2. 부가축 정수 설정
(1) 『[F2]: 시스템』 → 『5: 초기화』 → 『5: 부가축 정수 설정』을 선택합니다.
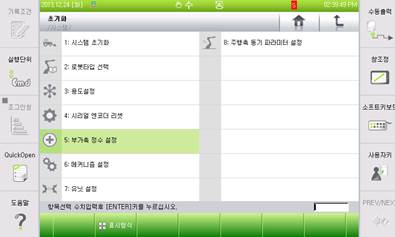
그림 2.5 부가축 정수 설정 메뉴
※ 상기 항목을 선택하기 위해서는
■티치 모드에서 Engineer code( R314 )입력
■Motors off상태
■부가축이 있을 때
화면 진입이 가능합니다.
(2) 부가축 기계정수를 설정합니다.

그림 2.6 부가축 정수 설정

l Hi5제어기는 총 6축의 부가축을 설정할 수 있으나, 서보핸드축으로 설정은 한 개 축만 가능합니다.
 부가축 정수 설명
부가축 정수 설명
(1) 축 사양
부가축 종류를 <베이스, 서보건, 포지셔너, 지그, 서보핸드>중에서 선택합니다.
부가축 사양을 결정할 때는, 논리적인 부가축 순서에 따라[베이스 → 서보건 → 포지셔너 → 지그 → 서보핸드] 순을 지켜야 합니다.
(2) 축 구성
축의 동작형태와 방향을 선택합니다.
직동 베이스축(주행축)인 경우, 전/후축 주행이면<X>, 좌/우축 주행이면 <Y>,상/하축 주행이면 <Z>로 선택합니다.
베이스축이 로봇 좌표계와 동일한 방향으로 설치되지 않은 경우는<임의>로 선택하고 『베이스축 캘리브레이션』을 실행합니다.
회전 베이스축도 직동 베이스 축과 같이 Rx/Ry/Rz를 선택하거나, <임의>로 선택하여 『베이스축 캘리브레이션』을 실행합니다.
서보건을 설정하는 경우는 『서보건 기능설명서』, 포지셔너를 사용하는 경우는 『포지셔너동기 기능설명서』를 참조하십시오
(3) 축 위치
부가축의 물리적인 구성을 사용자가 지정하여 사용할 수 있도록 합니다.
BD =[1](1~2) => BD542보드의 번호를 지정합니다. (2DSP/1Board)
DSP =[1](1~2) => BD542보드내의 DSP의 번호를 지정합니다. (4Axis/1DSP)
Axis =[4](1~4) => 축번호를 지정합니다.
예) 7번 부가축을 설정하기 위해서 1,1,4로 지정하였다면..
기본축 6축 - 주3축(1번 BD542, 1번 DSP, 1~3축)
손목3축(1번 BD542, 2번 DSP, 1~3축)
부가 1축(1번 BD542, 1번 DSP, 4번축)
(4) 감속비
모터 회전수당 축의 이동 량을 등록합니다.
직동축은 모터 회전수당 축 이동거리를 mm로, 회전축은 모터 회전수당 축 회전각도를 deg로 등록합니다. 부호는 모터의 정방향(엔코더가 증가하는 방향)이 축 동작방향과 일치하여 부가축 좌표치가 증가하면 “+”이고, 반대로 좌표치가 감소한다면 “-“로 정합니다.
아래 예시를 참고하십시오.
예 1) 1/100감속기만 사용하는 회전축이라면,
모터 100회전에 축이360deg회전하므로,
감속비 = + 360 / 100 [deg/rev]
예 2) 1/20감속기와PCD 110mm인 랙피니언을 사용하는 직동축이라면,
모터 20회전에 110xPhi(=3.14159)=345.5749[mm]를 이동하므로
감속비 = + 3455749 /200000 [mm/rev]
예 3) 1/5 감속기와Lead 5mm인 볼스크류를 사용하는 직동축이라면,
모터 5회전에 축이5mm이동하므로
감속비 = + 5 / 5 [mm/rev]
(5) 소프트리밋
로봇 유효동작영역(부가축 소프트 리미트)을 설정합니다.
직동축은 [mm]로 회전축은 [deg]로 설정하면 『[F2]: 시스템』 → 『3: 로봇 파라미터』 → 『3: 소프트웨어 리미트』에 설정 값이 반영됩니다.
(6) AMP 사양
부가축에 사용할 AMP의 사양을 선택합니다.
IPM 기호태를 선택하고 Hall Sensor 사양을 숫자 0-5 로 입력하여 AMP 사양을 선택합니다. AMP의 형식 사양은 다음과 같습니다.

IPM 기호와 Hall Sensor 기호에 따라 아래의 정격 용량을 갖습니다.
AMP Model | IPM 기호 | IPM 전류정격 | Hall Sensor | Full Scale 전류 |
대형 | L | 150Apeak | 0 | 140.62Apeak |
X | 100Apeak | 1 | 93.75Apeak | |
Y | 75Apeak | 2 | 46.87Apeak | |
Z | 50Apeak | 3 | 28.12Apeak | |
|
| 4 | 18.75Apeak | |
|
| 5 | 9.37Apeak | |
소형 | A | 30Apeak | 3 | 28.12Apeak |
D | 10Apeak | 4 | 18.75Apeak | |
|
| 5 | 9.37Apeak |
(7) Motor 사양
부가축에 사용되는 모터 사양을 선택합니다.
모터의 용량을 먼저 선택하고, 모터 사양을 선택합니다.
(8) 가감속 파라미터
부가축의 최고속과 가속시간을 설정합니다.
여기서 설정한 값은 『[F2]: 시스템』 → 『3: 로봇 파라미터』 → 『34: 가감속 파라미터』에 설정하는 것과 동일하게 적용됩니다.
부가축의 최고속을 사용자가 지정하지만, 모터 정격속도에 따라 제한됩니다.
부가축 동작 중 진동이 발생하면 가속시간을 조정해야 합니다.

l 베이스축, 서보핸드축을 동시에 설정할 때에는 베이스축, 서보핸드축의 순서로 부가축을 등록하여 주십시오.
l 부가축은 최대 6축을 등록할 수 있습니다.
l 서보핸드축은 1축만을 등록할 수 있습니다. 다음은 부가축을 설정하는 예입니다.
표 2‑1 [예 1] 서보핸드축만 설정하는 경우
부가축 | 축사양 | 핸드번호 |
제1축 | 서보핸드 | 1 |
표 2‑2 [예 2] 베이스축 + 서보핸드축
부가축 | 축사양 | 핸드번호 |
제1축 | 베이스 | - |
제2축 | 서보핸드 | 1 |
l 멀티 서보핸드는 지원하지 않습니다.
l 부가축 및 서보파라미터 설정이 완료되면 제어기의 주전원을 재투입하여 엔코더 관련 에러가 발생하지 않는지 확인합니다. 이때, 에러가 발생하면 『제어기 보수설명서』를 참조하여 주십시오.
l 서보핸드축에 에러발생 없이, 정상이 되었을 때 엔코더 보정을 실행합니다.
엔코더 보정이 완료된 후 모터에 전원을 공급(모터ON)하고, 부가축을 저속으로 움직이면서 Bit정수가 정확한지 확인합니다.
Bit정수의 확인은, 서보핸드가 이동한 실 거리와 모니터기능의 축데이터에서 표시된 서보핸드축의 데이터와 동일한지 비교하는 것입니다.
l 수동속도 및 자동운전 시 진동 및 떨림이 발생하면 기구적 조립상태의 점검 및 튜닝(가감속,게인)이 필요합니다.