3.2. 서보 핸드의 Jog 동작
3.2. 서보 핸드의 Jog 동작
티치펜던트에서 서보핸드의 조그동작을 하기 위해서는 『시스템』 → 『5: 초기화』 → 『6: 메커니즘 설정』화면에서 부가축의 메커니즘을 설정합니다.

그림 3.4 메커니즘 설정
티치펜던트의 [유닛/메커니즘]키를 누르면 티치펜던트 상단에 메커니즘 번호와 축번호가 표시됩니다.
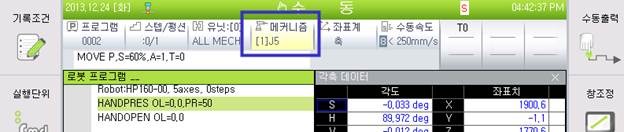
그림 3.5 메커니즘(서보핸드축) 조그가능 상태
축 순서에 따라 [X-], [X+]키를 누르면, 서보핸드축의 수동조작이 이루어집니다. 설정된 메커니즘에 부가축 순서대로 조그키만 동작하므로, 로봇은 조그 동작이 불가합니다. 서보핸드축의 조그동작은 좌표계에 관계없이 동일하게 동작합니다. 조그동작속도는 부가축 최고속은 250mm/sec로 제한됩니다.