2.1.1. 서보건 엔코더 보정
2.1.1. 서보건 엔코더 보정
통상적으로 서보건은 이동전극이 최대로 개방한 상태에서 엔코더 원점을 설정합니다. 이유는 서보건 모터의 교체 등으로 엔코더 데이터가 변경되었을 때 기구적으로 동일 위치를 쉽게 일치시킬 수 있기 때문입니다.
서보건축의 엔코더 보정 절차는 다음과 같습니다
(1) 서보건축의 브레이크를 수동으로 해제한 후, 이동전극이 최대로 개방한 상태가 되도록 합니다.

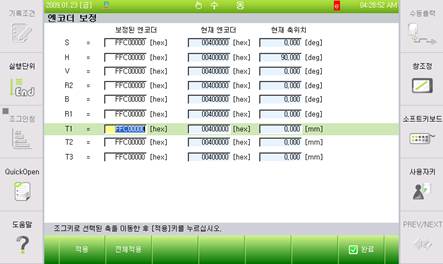
(2) 『[F2]: 시스템』 → 『3: 로봇 파라미터』 → 『4: 엔코더 보정』 에서 해당 서보건축을 커서로 선택한 후, 『[F1]: 적용』 버튼을 누릅니다. 현재 엔코더 값이 “00400000”이 되면 『[F7]: 완료』 버튼을 입력합니다.