4.7.1. 통신 프로토콜
4.7.1. 통신 프로토콜
HRVision Press와 현대 로봇 제어기는 다음과 같은 통신규약(Protocal)으로 데이터를 송수신합니다. 사용자는 통신규약에 맞게 로봇 작업 프로그램을 작성하십시오.
통신은 현대 로봇의 요청에 의해 이루어집니다. 현대 로봇이HRVision Press에게 요청하는 명령어는 2가지가 있습니다. 다음 표는 현대 로봇의 2가지 명령어에 대한 HRVision Press의 대응을 요약한 표입니다.
명령어 | 번호 | 기능 | HRVision Press 대응 |
TRACK | 01~99 | 모델 번호를 전달하고 패턴 인식 명령을 전달합니다. | 수신된 모델에 대하여 패턴 인식 작업을 수행하고, 검출된 Blank 개수를 현대로봇에게 전달합니다. |
CAMSFT | 01~04 | SHIFT 데이터를 요청할 카메라 번호를 전달합니다. | 해당 카메라에 대한 위치 이동량을”SHIFT X,Y,Z,RX,RY,RZ” 형식에 맞게 작성하여 현대 로봇에게 전달합니다. 위치 이동량이 측정되지 않은 경우에는 RX값이 1로 설정됩니다. |
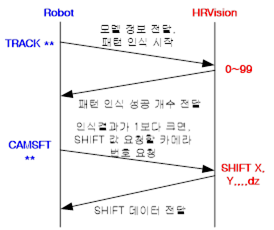
다음 그림은 현대 로봇과 HRVision Press와의 통신 시퀀스를 보여줍니다.