4.8.4. 평균 부하율 진단
4.8.4. 평균 부하율 진단
로봇 작업중에 각축에 사용된 모터 토크의 평균 부하율을 표시합니다. 평균 부하율 계산은 로봇이 서보에러나 비상정지가 발생하지 않는 정상적 작업중에만 계산하여 급속 정지할 때 발생하는 과 도한 토크는 제외하였습니다.
평균 부하율은 모터 토크 I/Ir 을 기준으로 작성되며, 로봇 제어기 내부에서 고정되어 있는 버퍼
를 사용하여 계산하기 때문에 로봇 작업 프로그램의 특성에 따라 평균부하율 갱신시간이 달라집
니다. 축 별로는 각축의 이동시간만 고려하여 평균치를 계산하므로 로봇 정지중의 토크는 평균 부하율에 산입하지 않습니다.
『[F1]: 서비스』 → 『7: 시스템 진단』 → 『9: 평균 부하율 진단』 선택합니다.
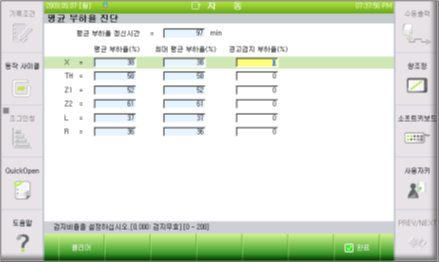
(1) 평균 부하율 갱신시간[min]
평균 부하율을 계산한 로봇 동작 시간입니다. 서보에러나 비상정지등으로 정지한 경우는 평균 부하율을 계산하지 않습니다.
(2) 평균 부하율(%)
평균 부하율 갱신시간 동안 각축 모터의 평균 부하율(I/Ir)을 나타냅니다. 평균부하율 표시는 로봇 제어기내부에 정해진 버퍼가 채워질 때부터 표시되며, 그 이전에 는 0으로 표시됩니다.버퍼가 채워지는 시간은 로봇 작업의 특성에 따라 차이가 있습니다.
(3) 최대 평균 부하율(%)
로봇 동작중 발생한 평균 부하율의 최대치를 표시합니다. 제어기 전원을 끄거나 『[F1]: 클리어』를 선택하면 다시 측정이 가능합니다.다만, 평균 부하율 갱신시간동안은 데이터가 0으로 나타납니다.
(4) 경고 검지 부하율(%)
각축 평균 부하율이 일반적인 사용치를 초과하였을 때 사용자에게 경고를 발생시키기 위해 사용자가 설정하는 부하율입니다. 0 이면 경고 검지를 하지 않고 값을 설정해야 검지 합니다. 경고가 발생하면 “W0142 축)작업중 평균치 부하율 이상”을 티치펜던트에 표시하고, 『[F2]: 시스템』→『2: 제어파라미터』→『2: 입출력 신호 설정 』→『4: 출력 신호 할당』 의 평균 부하율 이상 알람율 진단 에 설정된 출력이 발생합니다. 경고가 발생해도 로봇은 정지하지 않고 계속 작업합니다.
(5) 『[F1]: 클리어』
다시 측정을 시작하며, 이때에도 버퍼가 채워지는 시간을 기다려야 합니다

l 『[F1]: 클리어』을 선택하면 안내 프레임에 다음의 메시지가 표시됩니다.
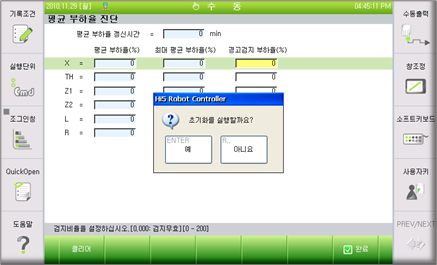
l [Yes]키를 선택하면 지금까지 저장된 평균 부하율 정보를 모두 지우고 초기화 합니다.