2.3.1. 공통 좌표 설정의 개요
2.3.1. 공통 좌표 설정의 개요
협조동작을 위해서는 로봇간에 상대적인 위치를 정확히 알아야 합니다. 로봇 제어기는 베이스 좌표계를 기준으로 툴 끝의 위치를 계산하고 있으며 상대 로봇에 대한 정보는 추가적으로 등록되어야 합니다. 로봇간의 위치 정보는 공통좌표계 설정을 통해 이루어집니다.
로봇 1과 로봇2의 위치를 상호 인식하기 위해 공통의 좌표계를 설정합니다. (그림2.3) 설정의 방식은 각각의 로봇에서 공간상의 동일한 위치의 3점을 티칭하여 설정합니다.
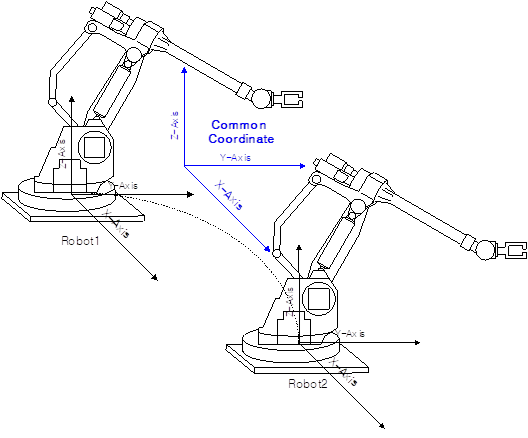
그림 2.4 협조 로봇간 공통 좌표계 설정

l 공통 좌표계 설정 이전에 로봇의 캘리브레이션을 먼저 수행하여야 합니다.