2.3.3. 주행축 시스템
2.3.3. 주행축 시스템
협조제어를 위한 주행축 시스템을 구성할 때에는 동일한 사양의 주행축을 가능한 평행하게 설치하여야 합니다.
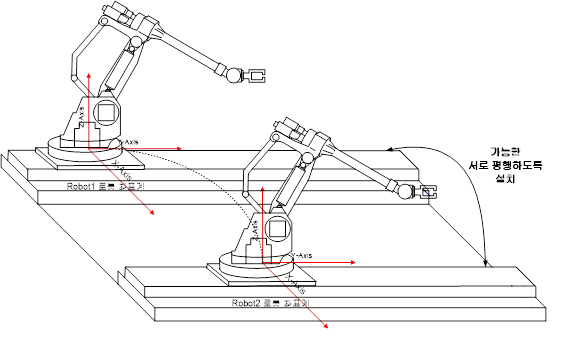
그림 2.6 협조제어를 위한 주행축 시스템 구성

l 주행축이 있는 시스템은 주행축 사양을 ‘임의’로 설정하고 주행축 캘리브레이션을 한 후 사용하여야 합니다.
l 협조 로봇간의 주행축은 가능한 서로 평행하게 설치해야 합니다.
l 주행축을 이동할 때 동기 오차가 커지는 것은 부정확한 주행축 캘리브레이션의 문제일 수 있습니다.
l 주행축 캘리브레이션 기능에 대한 설명은 『Hi5a 제어기 조작설명서』를 참고하십시오.
l 주행축 캘리브레이션은 MASTER, SLAVE 모두 해야 합니다.