2.3.4. 공통 좌표계 설정
2.3.4. 공통 좌표계 설정
공통 좌표계가 설정되어 있지 않으면 수동 협조 조그 조작이나 협조 재생이 불가합니다. 공통 좌표계가 설정되어 있는 경우 협조 조그 동작을 통해 공통 좌표계 설정이 올바로 되었는지 확인 후에 본격적인 작업을 하는 것이 바람직합니다.
공통 좌표계의 설정은 협조 로봇의 툴 선단의 위치를 정확히 알고 있어야 합니다. 그렇지 않을 경우 로봇간 협조제어 시 위치동기 오차가 발생하게 됩니다. 따라서 로봇의 원점 및 툴의 정확한 위치를 설정하기 위한 캘리브레이션이 필요합니다. Hi5a 제어기는 3차원 위치 측정기가 없는 경우 자동 캘리브레이션(『[F2]: 시스템』 → 『6: 자동 캘리브레이션』 → 『1: 축 원점 및 툴 길이 최적화』) 기능을 제공하고 있습니다. 3차원 위치 측정기를 보유하고 있다면 보다 정확한 캘리브레이션이 가능합니다. 이 경우에는 『9: 로봇과 툴 캘리브레이션』 기능을 이용하십시오. 보다 자세한 내용은 『Hi5a제어기 조작설명서』를 참고하십시오.
n ROBOT1, ROBOT2 로봇 두 대의 환경에서 공통 좌표계 설정 예시
① ROBOT1과 ROBOT2 제어기에 공통 좌표계 설정용 프로그램 번호를 선택합니다.
② ROBOT1과 ROBOT2를 각각 조그로 조작하여 가능한 큰 삼각형을 생성하도록 3점을 스텝 1,2,3에 순차적으로 기록합니다. 이때 기록위치는 공간상에 동일한 위치에 기록되어야 하며 보간 방식과, 속도는 무관하나 툴 번호는 툴 선단의 위치를 정확히 알고 있는 툴을 선택 하여야 합니다.
③ 수동 모드에서 『[F2]: 시스템』 → 『6: 자동 캘리브레이션』→『5: 협조로봇 공통 좌표계 설정』을 선택합니다.
④ 프로그램 번호 항목에 공통 좌표계 설정용 프로그램 번호를 입력합니다.
⑤ 『[F1]: 실행』키를 누릅니다. 실행 결과는 로봇 베이스에서 본 공통 좌표계 위치와 자세가 표시됩니다.
⑥ 『[F7]: 완료』키를 누르면 설정이 완료됩니다.

그림 2.7 각 로봇 별 공통좌표계 설정 프로그램
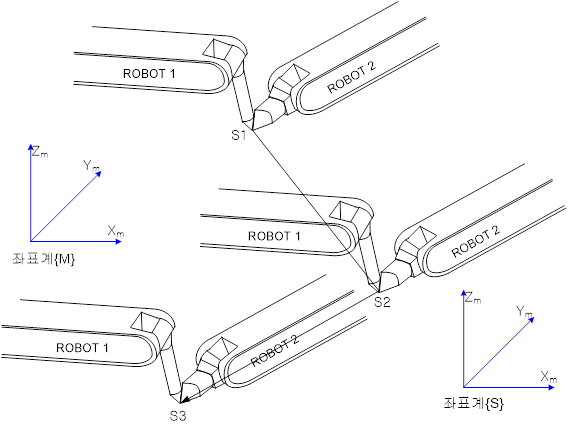
그림 2.8 공통 좌표계 설정 티칭 방법

그림 2.9 공통좌표계 설정 결과 화면

l 공통좌표계 설정용 툴 데이터 값은 정확한 툴의 규격을 입력하거나 자동 캘리브레이션을 통해 툴 데이터 값을 구하여 사용하십시오. 각 점은 로봇의 자세를 동일하게 기록하는 것이 바람직합니다.
l 설정한 3점이 가능한 큰 삼각형을 생성하도록 기록하십시오. 점 사이의 거리가 가깝거나, 3점이 거의 직선에 가까운 경우에는 에러가 발생합니다.
l 공통 좌표계의 자세 Rx, Ry, Rz의 변환은 로봇 좌표계와 다음과 같은 관계에 있습니다.
① 자신의 로봇(번호 2) 좌표계(ref)를 X축 방향으로 γ만큼 회전시킵니다.
② 자신의 로봇(번호 2) 좌표계(ref)를 Y축 방향으로 β만큼 회전시킵니다.
③ 자신의 로봇(번호 2) 좌표계(ref)를 Z축 방향으로 α만큼 회전시킵니다.
④ 자신의 로봇(번호 2)베이스 좌표계를 γ, β, α만큼 회전한 자세가 공통 좌표계의 공간상의 자세입니다.

그림 2.10 공통 좌표계의 자세 변환