3.4. 명령어 기반 가스스프링 압력 검사 예시
3.4. 명령어 기반 가스스프링 압력 검사 예시
(1) 가스스프링 압력 검사를 수행하기 위한 적절한 자세를 기록합니다. H축이 140도인 위치에서 검사를 수행하는 것을 권장합니다. 140도 위치에서 명령어를 실행하는 경우 로봇은 120도~140도 사이를 왕복합니다. H축이 50~120도 사이인 위치에서는 추정 성능이 저하됩니다. 기타 다른 축의 위치는 시험 수행과 관련이 없습니다.
(2) 본 예시에서 가스스프링 압력 검사를 하기 위한 로봇의 자세는 다음과 같습니다.
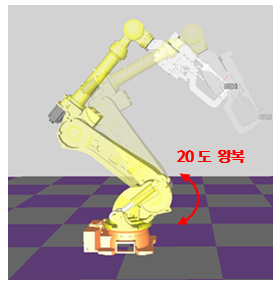
그림 3.7 가스스프링 검사 시 로봇의 이동
(3) 가스스프링 압력 검사용 프로그램은 다음과 같습니다.

그림 3.8 가스스프링 검사 프로그램 예시
(4) 실제로 작성한 프로그램을 실행한 후 모니터링 창의 결과를 확인합니다. 확인한 결과값과 기준값의 차이를 확인 후 이를 감안하여 경고, 에러 범위를 조절합니다.

그림 3.9 가스스프링 검사 프로그램 예시
상기와 같이 가스스프링 압력 검사 중 추정된 압력이 기준과 별 차이가 없는 경우 경고 기준을 좀더 엄격하게 설정하면 가스 이상을 조기에 발견할 수 있습니다.반대로 차이가 크게 추정되는 경우에는 경고 기준을 낮추면 오검지 가능성을 낮출 수 있습니다.
◆【참고사항】◆
로봇의 실제 부하, 부가 중량, 외기 온도 등 요인에 의하여 추정 압력 오차가 발생할 수 있습니다.
시스템 초기 설정 후 추정 결과값에 따라 기준값을 적절하게 조절하십시오.