4.1. 모델 계층 구조의 개념
4.1. 모델 계층 구조의 개념
HRSpace3에서는 작업공간 안의 모든 물체를 ‘모델’이라는 이름으로 부릅니다. 차체나 로봇, 툴, 지그와 같은 물체들, 혹은 교시한 스텝들이나 좌표계들도 모두 일종의 모델들입니다.
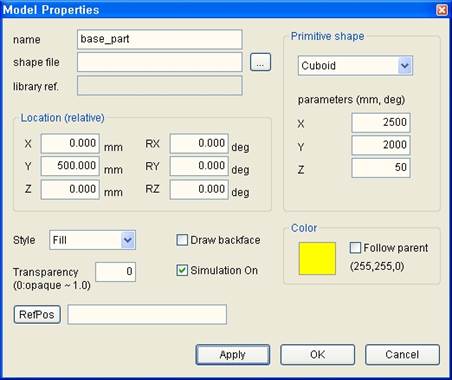
각각의 모델들은 이름, 위치, 형상, 색상, 투명도 등과 같은 자신의 속성들을 가지고 있습니다. 이러한 속성은 다음과 같은 모델 속성 대화상자를 열어 편집할 수 있습니다.
다음 그림과 같이 링크, 로봇, 스텝 등 기본모델로부터 속성을 상속받은 모델들도 있습니다.
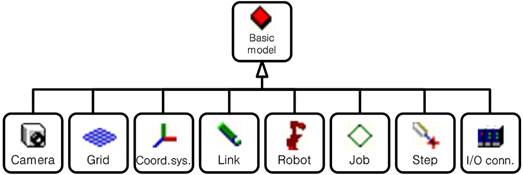
상속을 받는다는 것은, 기본모델 속성들을 물려받아 가지고 있으면서 자신의 고유의 속성들을 추가로 더 가지고 있다는 뜻입니다.
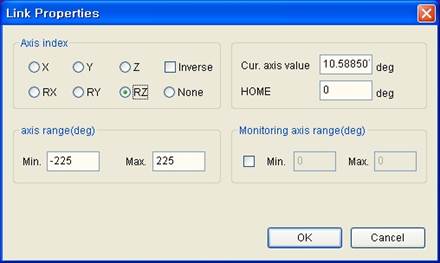
예를 들어 링크모델은 위와 같은 모델 속성을 가지고 있으면서, 추가로 다음과 같은 링크속성을 더 가지고 있습니다.
모델들은 작업공간 안에서 계층구조를 형성하며 배치됩니다. (위의 상속그림과 혼동하지 마십시오. 아래의 계층구조는 상속이 아닌 소유의 개념입니다.)
모델 A의 하위에 모델 B가 위치한다면 모델 A는 부모, 모델 B는 자식의 관계가 됩니다.
n 자식모델은 부모모델의 위치를 원점으로 사용하기 때문에, 부모가 이동하면 그 하위의 모든 자식들은 함께 이동하게 됩니다.
(단, 모델 속성 중 참조위치를 설정한 경우는 참조위치를 원점으로 사용합니다.)
n 부모모델을 삭제하면, 그 하위의 모든 자식모델은 함께 삭제됩니다.
n 부모모델을 복제하면, 그 하위의 모든 자식모델은 함께 복제됩니다.
n 부모모델을 저장하면, 그 하위의 모든 자식모델은 함께 저장됩니다.
아래 그림의 계층구조를 보면, 받침대의 자식모델이 정육면체이고, 정육면체의 자식모델이 접시입니다.

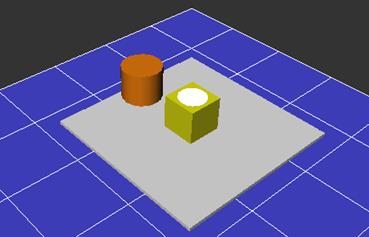
부모모델인 받침대를 움직이면 자식모델들이 같이 움직입니다.

반면 정육면체를 움직이면 자식모델인 접시는 같이 움직이지만, 부모모델인 받침대는 움직이지 않습니다.

정육면체를 삭제하면 자식모델인 접시도 함께 삭제됩니다.

시뮬레이션할 자동화라인의 레이아웃도 복잡성의 차이만 있을 뿐 이처럼 모델들과 모델들간의 관계를 통해 구성하게 됩니다.