6.2. 가상제어기와 제어기 파일
6.2. 가상제어기와 제어기 파일
작업공간에 불러온 로봇 1개당 가상제어기가 1개씩 연결되어 있습니다. 처음 로봇을 불러오면 가상제어기는 시스템 초기화 후 해당 로봇타입이 선택되고 부가 축이 없는 상태로 설정된 상태입니다.
허용되는 로봇의 최대 개수는 10개입니다.
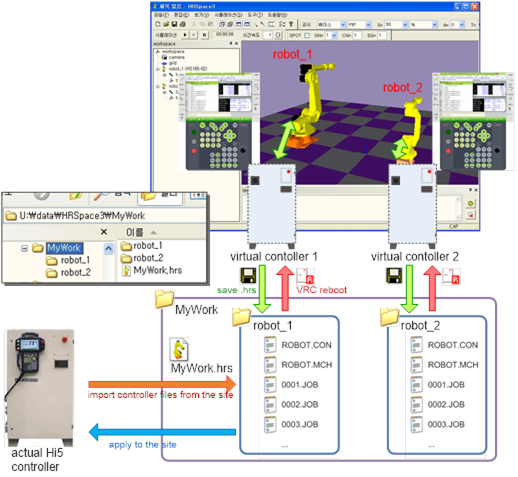
실제의 Hi5a제어기의 경우, 작업파일을 작성하면 .JOB파일로 저장되고, 각종 시스템 설정을 하면 .CON이나 .MCH, 혹은 기타 다양한 설정파일에 저장됩니다. 가상제어기도 이와 동일하며, 이러한 텍스트 파일들은 .hrs 문서파일에 내포되지 않고 별도의 폴더에 저장됩니다.
~~ ~~
~~
로봇 모델에 대한 팝업 메뉴에서 가상제어기 도구를 선택하면, VRC 도구 대화상자가 열립니다.
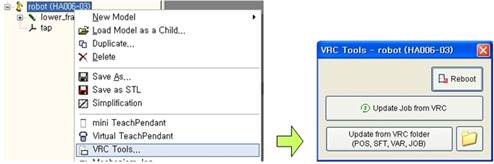
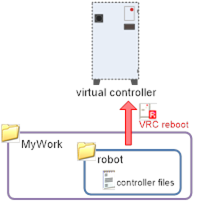
| .hrs 문서를 새로 열면, 모든 로봇모델에 대한 가상제어기들은 모든 제어기 텍스트 파일을 불러들이면서 부팅됩니다. |
| |
| VRC 도구 대화상자의 [재부팅] 버튼을 클릭하면, 가상제어기는 모든 제어기 텍스트 파일을 불러들이면서 재부팅됩니다. | ||
| VRC 도구 대화상자의 [VRC 폴더로부터 갱신] 버튼을 클릭하면, 재부팅 없이 모든 변수파일, JOB 파일만 불러들입니다. | ||
| JOB 모델에 대해 팝업메뉴에서 [폴더로부터 갱신]을 선택하면, 선택한 JOB에 대해서만 텍스트파일로부터 갱신합니다. | ||
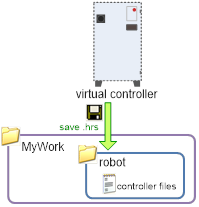
| 전체 .hrs 문서를 저장하면 모든 로봇모델에 대해 모든 제어기파일이 텍스트 파일로 저장됩니다. |
| |
| JOB 모델에 대해 팝업메뉴에서 [폴더에 저장]을 선택하면, 선택된 JOB만 텍스트파일로 저장됩니다. | ||
| JOB 모델에 대해 팝업메뉴에서 [메모장 편집]을 선택하면, 선택한 JOB을 메모장으로 열어 편집할 수 있습니다. 편집 후에는 [폴더로부터 갱신]을 실행해줘야 가상제어기에 반영됩니다. |
| |
| VRC 도구 대화상자의 [폴더] 버튼을 클릭하면 탐색기로 VRC 폴더를 열 수 있습니다. |
| |