6.4. TCP와 툴 번호
6.4. TCP와 툴 번호
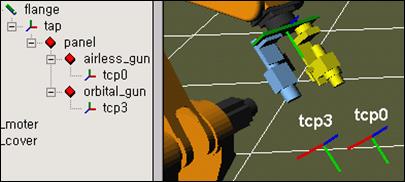
Airless_gun의 자식모델로서 tcp(Tool Center Point)라는 좌표계모델이 있을 것입니다. tap를 기준으로 한 tcp의 상대적인 위치/방향 데이터는, 스텝을 기록할 때와 시뮬레이션을 수행할 때, 0번 툴(T0)의 위치/방향 데이터로 사용됩니다. Hi5a 제어기는 총 16개의 툴(T0~T15)을 지원하는데, 이에 해당하는 좌표계모델은 tcp0~tcp15입니다.
예를들어, 다음과 같이 2개의 툴을 장착하고 각각을 tcp0, tcp3으로 이름을 설정했다고 가정합니다.
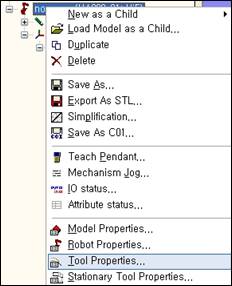
툴 데이터 값을 직접 편집하고 싶다면, 로봇에 대해 마우스 오른쪽 버튼을 클릭하여 팝업메뉴를 열고 툴 속성을 선택합니다.
다음과 같이 툴 속성 대화상자가 열립니다. 가령 tcp3의 툴 데이터를 편집하려면 T3 탭을 클릭한 후, 툴의 정확한 길이와 방향을 입력한 후 확인 버튼을 클릭합니다. 입력 방식은 실제 Hi5a 제어기의 툴 정수 설정화면과 동일합니다.
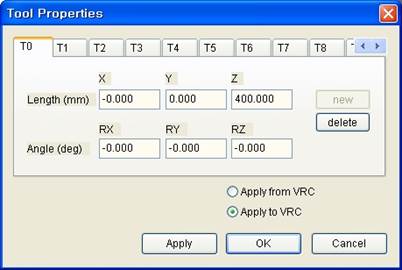
(tcp에 대해 모델 속성의 상대위치값을 조정하거나 시프트 기능을 사용해도 툴 데이터를 조정할 수 있습니다.)
가상제어기와의 연동방식을 아래 옵션 중 하나로 선택하십시오.
VRC로부터 반영받기 | 가상제어기에서의 툴데이터의 변화가 가상제어기에 즉각 반영됩니다. 현장의 로봇제어기 파일을 불러들여 3D 화면에서 관찰하거나, 가상 티치펜던트를 조작 연습용으로 활용할 때 유용한 설정입니다. |
VRC로 반영하기 | HRSpace3에서의 툴데이터의 변화가 가상제어기에 즉각 반영됩니다. 3D화면에서 작업 셀을 설계하여, 로봇제어기 파일들을 생성해낼 때 유용한 설정입니다. |
설정된 툴 데이터는 다음과 같이 활용됩니다.
(1) 메카니즘 조그 대화상자를 이용하여 툴좌표계 조그를 할 때, 현재 선택된 툴 좌표계를 기준으로 합니다.

(2) T/P의 기록 버튼으로 스텝을 기록할 때, 현재 선택된 툴 좌표계 위치에 스텝이 생성됩니다.
