6.3. 툴 불러와 로봇에 장착하기
6.3. 툴 불러와 로봇에 장착하기
트리창의 로봇을 보면 tap (Tool Attachment Point)가 달려있습니다. tap의 자식모델로서 툴을 불러와야 합니다.
다음과 같이 tap에 마우스 오른쪽 버튼을 클릭하여 팝업메뉴를 열고 모델 불러오기를 선택합니다.

Library 폴더에 대해 열기 대화상자가 나타납니다.
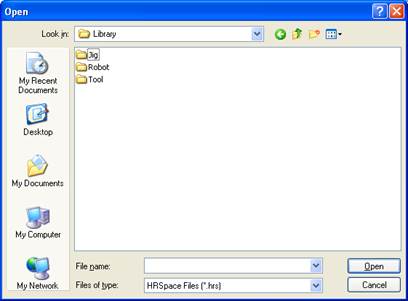
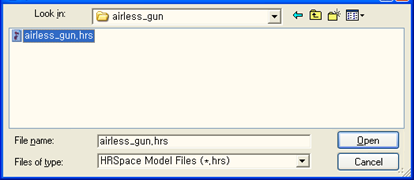
Library 폴더 밑의 Tool 폴더를 여십시오. 예를 들어, 샘플 airless_gun 툴을 붙인다고 가정한다면, Tool 폴더 밑의 sealing/airless_gun/ 폴더를 연 후, airless_gun.hrs 파일을 선택하고 확인버튼을 클릭합니다.
다음과 같이 트리창의 로봇 밑에 airless_gun 이라는 모델이 생성되었습니다. 3차원 화면에서도 툴이 로봇에 장착된 것을 볼 수 있습니다.
