7.1. 로봇 조그
7.1. 로봇 조그
조그 대화상자로 로봇을 움직일 수 있습니다.
트리창의 로봇에 대해 마우스 오른쪽 버튼으로 팝업메뉴를 열어 보십시오.
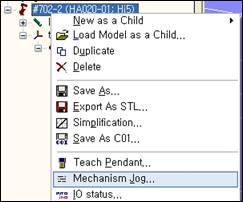
메커니즘 조그를 선택하면 다음과 같은 조그 대화상자가 나타납니다.
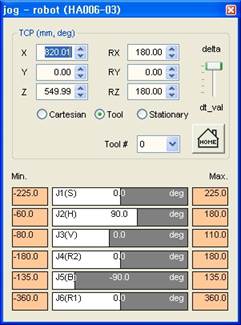
n 스크롤 바
로봇 6축을 위한 6개의 스크롤바가 있으며 부가축이 있는 경우에는 그 개수만큼 부가축 스크롤바가 나타납니다. 스크롤바 중앙에는 각 축의 현재 축각도값이 나타납니다. 또한 각 축이 움직일 수 있는 최소값들과 최대값들도 표시됩니다.
스크롤 바를 조작하여 로봇의 각 축을 독립적으로 움직일 수 있습니다. 패러랠 로봇의 경우에는 V축의 최대/최소값이 H축에 종속적입니다.
또한, ENTER키를 누르면 선택된 축의 값을 편집할 수 있는 대화상자가 나옵니다. 키보드로 수치를 입력하고 ENTER키로 편집을 완료하십시오.

각 축의 최소값이나 최대값을 더블클릭하면 소프트리미트도 편집할 수 있습니다.

n TCP
대화상자 오른쪽에는 TCP(Tool Center Point; 로봇 툴끝)의 위치와 방향이 직교좌표로 표시됩니다. X, Y, Z, RX, RY, RZ의 각 항목에 대해 상/하 스핀버튼을 눌러 TCP를 직교좌표 방식으로 움직일 수 있습니다. 혹은, 각 항목의 편집상자를 마우스 왼쪽 버튼으로 눌러 선택한 후, 키보드의 커서키 상/하를 누르거나,마우스 휠을 상/하로 돌려서 조작할 수도 있습니다.
(이러한 조작마다 delta 슬라이더로 지정한 수치만큼의 값이 증감합니다.)
또한, 각 축의 값을 키보드로 직접 입력한 후 Enter키를 치거나 다른 에디트박스를 선택하여 반영시킬 수도 있습니다.
n HOME버튼
HOME버튼을 클릭하면 로봇이 HOME위치(기본자세)를 취합니다.
n 직교 / 툴 / 정치툴
① TCP의 X, Y, Z, RX, RY, RZ의 각 축을 조작할 때, 어떤 좌표계를 기준으로 할지를 선택할 수 있습니다.
직교를 선택하고 TCP를 조작하면 로봇좌표계를 기준으로 툴 끝이 쉬프트됩니다.
② 툴을 선택하고 TCP를 조작하면 현재 선택된 툴의 좌표계를 기준으로 툴 끝이 쉬프트됩니다.
③ 정치툴을 선택하고 TCP를 조작하면 현재 선택된 정치툴의 좌표계를 기준으로 로봇이 들고있는 작업물이 쉬프트됩니다.