1.3. LVS조건설정
1.3. LVS조건설정
LVS2ON 명령어에서 QuickOpen을 누르면 조건편집창에 진입할 수 있습니다.
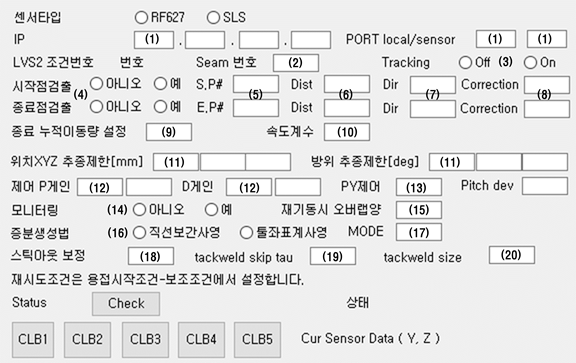
그림 1.6 LVS 조건 편집창
(1) IP, PORT
IP는 센서 혹은 센서 컨트롤러의 IP를 설정합니다.
PORT의 경우 local은 제어기, sensor는 센서측 PORT입니다.
(2) Seam 번호
Seam번호는 LVS센서에 등록된 seam번호입니다. 여기서 설정한 seam 번호로 센싱하도록 LVS센서에 명령합니다.
(3) Tracking
트래킹의 유효, 무효를 설정합니다. 이 Tracking Off기능은 MULTIPASS 용접시 유용하게 사용됩니다.
(4) 시작점, 종료점 검출
시작점과 종료점 탐색여부를 설정합니다.
시작점검출은 하기 그림과 같이 동작합니다.
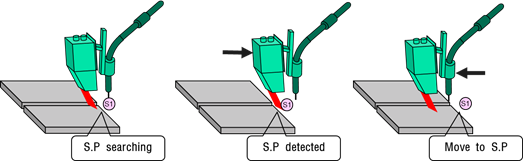
그림 1.7 LVS 시작점 탐색 유효의 예
시작점 검출을 유효로 설정할 경우 LVSON 명령어가 실행되면 그림 1.7과 같이 탐색을 시작합니다.
시작점이 탐색되면 로봇은 시작점으로 이동하면서 앞으로 따라갈 용접선의 정보를 저장합니다.
시작점 검출을 무효로 사용할 경우 하기 그림과 같이 센싱 시작점에서 레이저가 보는 방향으로 이동 후 트래킹을 시작합니다.
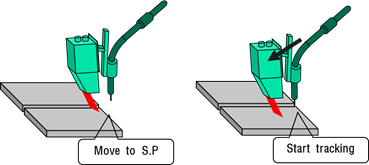
그림 1.8 LVS 시작점 탐색 무효의 예
종료점 검출은 하기 그림과 같이 동작합니다. 종료점 검출을 사용하면 TCP-레이저스트립 거리인  만큼의 종료점
만큼의 종료점
오차를 보상할 수 있습니다. 종료점 검출은 센서가 seam이라고 판단하지 않는 점까지 종료점을 연장하여 용접을 수행합니다.
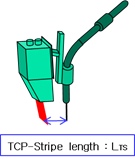
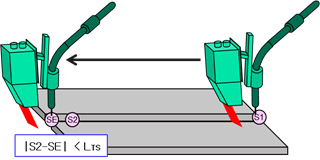
그림 1.9 LVS 종료점 탐색 예
(5) 할당포즈번호 (S.P#, E.P#)
시작점, 종료점 탐색이 완료되면 해당 포즈번호에 포즈가 기록됩니다.
(6) 탐색거리 (Dist)
시작점, 종료점 탐색시 최대탐색거리를 설정합니다.
(7) 탐색방향 (Dir)
+1 이면 +ToolX, -1이면 –TooX 방향으로 탐색을 실시합니다.
(8) Correction (탐색 보정량)
시작점, 종료점탐색시 포즈에 위차오차가 있을 경우 이를 보정하는데 사용합니다.
(9) 종료 누적이동량 설정
MODE4 일 때 설정한 거리[mm]만큼 이동시 트래킹이 종료됩니다.
(10) 속도계수
종료점 탐색 유효로 설정시 종료점까지 이동하는 속도를 설정합니다. MODE4에서는 전진방향 이동속도입니다.
(11) 위치 XYZ 추종제한, 방위 추종제한
티칭된 프로그램과의 오차를 설정합니다. 이 제한값 이상 추종할 경우 에러가 발생합니다.
(12) 제어 P게인, D게인
10~30 범위의 값을 설정합니다. (통상 모든 값을 15로 사용합니다)
(13) PY제어
0일 경우 위치만 보정하며 방위제어를 사용하지 않습니다. 1일경우 Pitch, 2일경우Yaw, 3일경우 Pitch&Yaw를 용접선에 맞추어 트래킹 합니다. MODE4를 사용할 경우 PY제어는 4를 사용하십시오.
(14) 모니터링
모니터링기능을 활성화 할 경우 0001.GDT파일에 트래킹데이터 수집이 가능합니다.
(15) 재기동시 오버랩양
재기동시 Overlap할 거리를 지정합니다.
(16) 증분생성법
직선보간사영을 사용하십시오.
(17) MODE
LVS기능의 버전으로 MODE를 1은 일반 트래킹, 3은 정지 트래킹, 4는 MOVE문 없는 트래킹 입니다.
(18) 스틱아웃보정
와이어 스틱아웃 길이를 조정할 때 사용합니다.
(19) tack 용접 검출 민감도
tack용접 검출 민감도를 설정합니다. 통상 0.7 ~ 1.0의 값을 사용합니다.
(20) tack 용접 길이
tack용접 길이를 설정합니다.이 거리만큼 트래킹이 무시되고 보간되어 진행됩니다.
(21) 재시도 조건은 용접시작조건-보조조건에서 설정합니다.
(22) 크레이터처리는 용접종료조건에서 크레이터 후진거리 항목에 설정합니다.
(23) LVSON 명령어를 수행한 후 Check 버튼을 누르면 현재 상태를 볼 수 있습니다.