5.3.1. 레이아웃 배치 및 JOB 프로그램 로드
5.3.1. 레이아웃 배치 및 JOB 프로그램 로드
(1) 위의 [5.2 패턴 생성을 위한 단계별 진행]을 거치고 나면, 해당 폴더에 아래의 (표 5-1)와 같은 파일들이 생성되어 있는 것을 확인할 수 있습니다. 시뮬레이션을 하기 위해서 0200, 0400, 0601.JOB 의 내용을 수정해야 합니다.
표 5‑1 생성된 JOB 프로그램의 역할 및 사용자 수정 필요 여부
파일이름 | 역할 | 사용자 수정 필요 여부 |
0001.JOB | 메인 프로그램 |
|
0050.JOB | Vacuum On |
|
0051.JOB | Vacuum Off |
|
0100.JOB | 공정 파라미터 설정 |
|
0200.JOB | 각종 변수 초기화 | ㅇ |
0300.JOB | 각종 신호 초기화 |
|
0400.JOB | 홈포지션, 작업물 위치 포즈 프로그램 | ㅇ |
0451.JOB | 툴 제어 프로그램 |
|
0501.JOB | 팔레트 적재패턴 쉬프트 변수 |
|
0551.JOB | 간지 쉬프트 변수 |
|
0601.JOB | 팔레트 좌표계 생성 프로그램 | ㅇ |
0701.JOB | 팔레트 파라미터 설정 |
|
0751.JOB | 기본 팔레타이징 프로그램 |
|
0801.JOB | 간지 파라미터 설정 |
|
0851.JOB | 간지 삽입 프로그램 |
|
0999.JOB | 에러 핸들링 프로그램 |
|
1001.JOB | (시뮬레이션용)테스트 셋업 |
|
1002.JOB | (시뮬레이션용)테스트 종료 조건 체크 |
|
Result.hrs | HRSpace3 Project File |
|
(2) 우선 생성된 Result.hrs 파일을 열어보면, 다음과 같은 화면을 볼 수 있습니다. (그림 5.9).
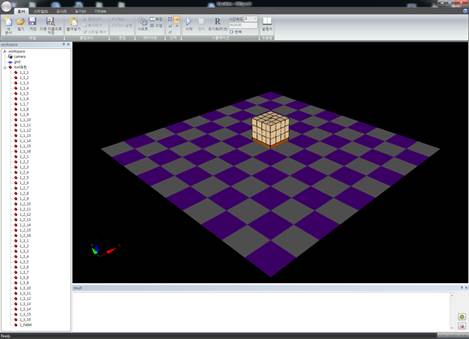
그림5.9HRpal 을 통해 생성된 HRSpace3 Project
(3) 그림 5.1 팔레타이징 예제 구성을 참고하여 workspace 트리에 HP160 로봇을 추가한 후(그림5.10), 홈 탭의 시프트 기능을 사용하여 적절하게 위치를 배치합니다.
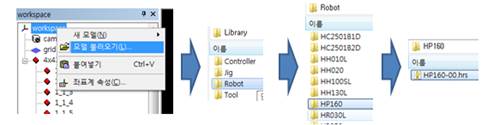
그림5.10HP160 로봇의 추가
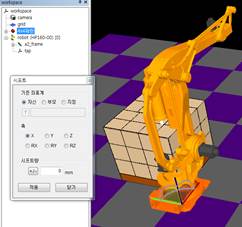
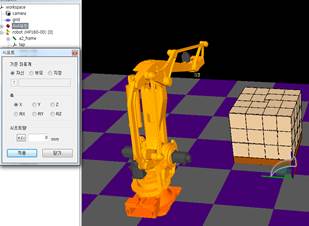
그림 5.11 시프트 기능
(4) 보다 확실하게 로봇이 물체를 올바르게 이동시키고 있는지 확인하기 위해, 4x4패턴에 있는 1_1_1 모델을 복제한 후, robot 트리 밑의 tap에 붙여넣기 하고, 모델 속성에서 위치(상대)값의 X, Y, Z 를 0, 0, 0으로 변경하여 로봇이 물체를 들고 있는 과 같은 형상으로 변경합니다(그림 5.12).
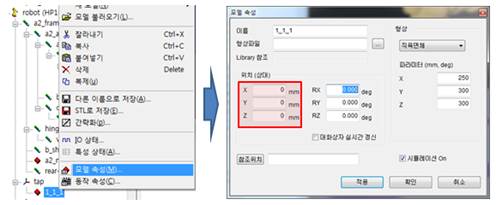
그림5.12 로봇이 물체를 들고 있는 것과 같이 형상 변경
(5) 배치가 끝난 후, 파일을 저장하면 폴더에 robot 폴더가 생성된 것을 확인할 수 있습니다.
(6) HRpal을 통해 만든 JOB 프로그램을 모두 robot 폴더에 옮긴 후, 가상제어기 도구의 VRC 폴더로부터 갱신 기능을 사용하여 JOB 프로그램을 가상 제어기에 로드 합니다.(그림 5.13).
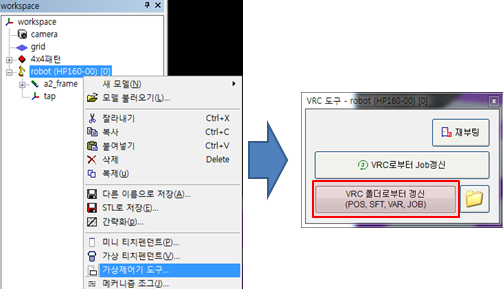
그림5.13 가상제어기에 표준 JOB 프로그램을 반영하는 방법