5.3.2. JOB프로그램 수정 및 위치 기록
5.3.2. JOB프로그램 수정 및 위치 기록
(1)그림 5.1 팔레타이징 예제 구성을 살펴보면, 적재물을 들어올리고 내려 놓는 높이가 400mm 로 지정되어 있는 것을 확인할 수 있습니다. 해당 내용은 0200.JOB 에 정의되어 있으며, 가상 티치 펜던트를 사용하거나 텍스트 편집 기능을 사용하여 V![121] 변수의 값을400 으로 변경합니다(그림 5.14).
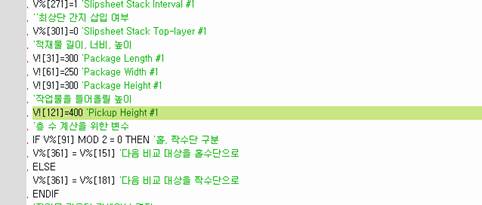
그림5.140200.JOB 의 V![121] 값 변경
(2)위의 내용을 변경한 후, 파일로 저장하기 위해 아래의 그림 5.15와 같이 0200.JOB 파일을 폴더에 저장 기능을 사용하여 저장합니다.

그림5.15 가상 티치 펜던트에서 내용 변경 후, 파일 반영 방법
(3)홈포지션 및 작업물의 위치를 기록하기 위해 0400.JOB 파일을 수정해야 합니다. 우리가 수정해야 할 포즈 변수는 P6001, P6501, P7001 이며, 각각 홈포지션, 픽업 위치, 간지 픽업 위치를 의미합니다.

그림 5.160400.JOB 파일 구성
(4)먼저 홈포지션을 기록하기 위해 가상 티치 펜던트를 사용하여 Motor ON 버튼을 누르고, 수동 모드 상태에서 로봇을 올바른 위치에 이동시킵니다. 티칭의 편의성을 위해 좌표계는 직교좌표계를 사용하여 티칭합니다(그림 5.17).

그림5.17Motor ON, 모드스위치 변경 및 좌표계 변경 위치
(5)로봇을 원하는 위치에 이동한 다음에 아래의 그림 5.18과 같이 변수 → pose→ 포즈상수를 사용하여 로봇의 위치를 P* 에서 현재 위치로 변경합니다.
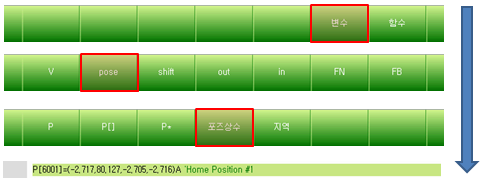
그림5.18 포즈 상수를 활용한 위치 기록
(6)나머지 2개의 포즈(P6501, P7001)도 위와 같은 방식으로 기록합니다. 참고로 본 예제에서는 다음과 같은 자세들을 기록해서 사용하였습니다.
표5‑2 예제에서 사용한 홈포지션, 픽업위치, 간지픽업위치의 형태와 좌표값
홈 포지션 | 픽업 위치 | 간지 픽업 위치 |
|
|
|
(-2.717,80.127,-2.705,-2.716)A | (23.098,44.396,-8.083,23.099)A | (-119.867,50.580,-21.423,-119.863)A |



(7)다음으로 작업물을 내려놓기 위한 팔레트의 좌표계를 기록해야 합니다. 이는0601.JOB 의 P1, P2, P3 의 3가지 점으로 기록하여 사용합니다.
(8)작업 티칭 대상이 되는 위치는 그림 5.7 레지스터 번호 지정 및 티칭 위치 설정 확인의 1번 위치이며, HRSpace3 상에서는 아래의 그림 5.19에 표시되어 있는 적재물 중, 흰색으로 표기된 위치와 같습니다.

그림5.19 P1 티칭점 위치(하얀색 적재물, 1_1_1)
(9)P1을 직교좌표계 상에서 회전 없이 이동으로만 적재물 위치에 정확히 위치시켜서 티칭합니다. 티칭은 그림5.18 의 포즈 상수 기록 방식과 동일하게 수행합니다.
(10)P2점은 P1 점을 티칭 한 후, 직교 좌표계 상에서 X+ 방향으로 약간만 이동한 후, 기록하고, P3 점은 그 상태에서 Y+ 방향으로 약간만 이동한 후 기록합니다.
(*) 해당 예제에서는 아래의 표 5.3 P1, P2, P3 위치 기록 예와 같은 위치를 기록했습니다.
표 5‑3 P1, P2, P3 위치 기록 예
P1 | P2 | P3 |
|
|
|
(-41.373,22.353,43.769,-41.3689)A | (-38.439,6.302,74.822,-38.434)A | (-29.795,28.510,31.846,-29.790)A |



티칭을 완료한 후, 가상 티치 펜던트에서 0001.JOB을 자동 운전으로 실행하면 중간에 STOP 명령을 만나 멈추는 부분이 있습니다. 이를 삭제하거나 무시하고 시작 버튼을 계속 눌러 진행하면 팔레타이징 작업이 정상적으로 수행되는 것을 확인할 수 있습니다.