1.2.3. 공통 동작 흐름
1.2.3. 공통 동작 흐름
그림 1-3는 로봇과 Pick-it 사이의 역할과 동작 흐름을 설명하고 있습니다. 로봇과 Pick-it 사이의 모든 동작은 기본적으로 그림 1-3에서 나타난 동작 흐름과 동일합니다. 그림에서 로봇과 Pick-it 사이의 세로선은 시간의 흐름을 나타내며 위에서 아래로 시간이 흘러가는 것을 의미합니다. 세로선이 2개가 있는데 왼쪽은 로봇의 시간과 동작을 의미하며 오른쪽은 Pick-it의 시간과 동작을 의미합니다. 2개의 세로선 사이의 가로선은 로봇과 Pick-it 사이에서 주고 받는 명령과 데이터를 의미하고 화살표가 가리키는 방향으로 전달이 이루어 집니다.
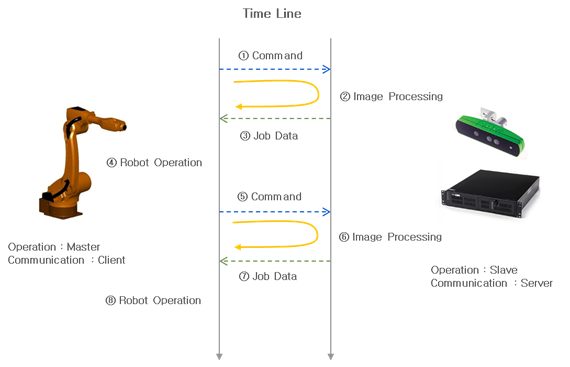
그림 1-3 로봇과 Pick-it 동작 흐름도
기본적인 로봇과 Pick-it 사이의 동작 순서는 다음과 같습니다.
l 작업이 없을 때는 로봇과 Pick-it 모두 대기 상태입니다.
l 작업이 발생하면 로봇은 Pick-it으로 명령을 전송합니다.
l Pick-it은 명령을 대기하고 있다가 로봇으로부터 명령을 수신 받으면 해당 명령을 처리합니다.
l 이 사이에 로봇은 Pick-it으로부터 명령 처리 결과를 수신하도록 대기합니다.
l 로봇은 Pick-it으로부터 처리결과를 수신 받으면 이때부터 작업을 수행합니다.
l 작업이 끝나면 로봇은 다시 Pick-it으로 명령을 전송하고 상기 과정을 반복합니다.
로봇과 Pick-it의 연동은 상기의 과정을 따르며 명령과 작업에 따라 주고 받는 명령과 데이터만 달라지고 흐름은 동일합니다. 실제 명령의 전송과 데이터 수신 과정에 대한 자세한 설명은 3장과 4장에서 다루고 있습니다.