2.4.2. Pick-it통신 포트
2.4.2. Pick-it통신 포트
Pick-it 서버에는 2개의 이더넷 포트가 존재합니다. 하나는 로봇 제어기와 연결을 하기 위한 것이고, 다른 하나는 Pick-it 서버 제어를 하기 위한 PC와 연결을 하기 위한 것입니다. 포트 소켓을 잘 살펴보면 로봇과 PC 연결을 위한 안내표시가 있으니 잘 확인하고 로봇과 PC를 연결하시기 바랍니다.

그림 2-3 로봇용 이더넷 포트 연결
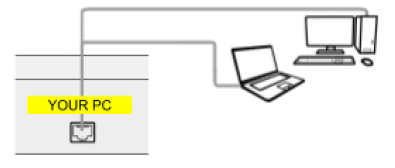
그림 2-4 PC용 이더넷 포트 연결
Pick-it 은 앞서 설명한대로 이더넷 포트를 2개가 제공하고 있으며 TCP 통신이 가능한 로봇을 이용할 경우에는 별도의 이더넷 스위치나 라우터를 이용하지 않고도 PC와 로봇을 직접 연결할 수 있습니다. TCP 프로토콜을 지원하는 로봇과 Pick-it을 연결한 예시는그림 2-5에 나와 있습니다. PC 포트에는 이더넷 케이블을 이용해서 PC와 직접 연결을 하고 로봇 포트도 이더넷 케이블을 이용해서 로봇 제어기와 직접 연결하면 됩니다. 연결은 Pick-it 제공하는 이더넷 케이블을 이용해도 되고 일반 이더넷 케이블을 이용해도 됩니다. 이렇게 TCP 통신을 이용하는 경우에는 전체 통신 시스템이 단순하게 구성됩니다.

그림 2-5Pick-it TCP 이용 이더넷 연결
현대로봇 Hi5a 제어기는 UDP 통신만 지원하기 때문에 앞에서 설명한 것과 같은 형태로 구성할 수 없습니다. 그래서 그림 2-1과 같이 UDP2TCP 변환기와 함께 이더넷 스위치를 통해서 연결을 해야 합니다.
Pick-it 과 로봇이 통신을 하기 위해서는 이더넷 케이블 연결 후에 Pick-it의 이더넷 IP 주소와 포트번호를 설정해줘야 합니다. 크롬화면에서 Pick-it 장비의 IP 주소와 포트번호를 설정할 수 있는데 표 2-1에 나와 있는 값으로 설정하시면 됩니다. 이때 주의할 점은 이 주소와 번호는 로봇과 연동을 위한 이더넷 포트에 해당하는 것으로 PC 연동을 위한 포트와 혼동하지 마시기 바랍니다.
표 2-1Pick-it IP 주소와 포트번호
Pick-it TCP IP 주소 | 192.168.1.12 |
Pick-it TCP 포트 번호 | 5001 |