2.4.3. 현대로봇 통신 포트
2.4.3. 현대로봇 통신 포트
현대 로봇Hi5a 제어기는 UDP 프로토콜 이더넷 통신만 지원하고 있습니다. 로봇 제어기와 이더넷 연결을 위해서 이더넷 케이블의 한쪽 커넥터를 로봇 제어기 이더넷 소켓에 연결하고 다른 커넥터를 이더넷 스위치의 이더넷 소켓에 연결하시면 됩니다.
이더넷 케이블을 연결한 후에 로봇이 이더넷 통신을 하기 위해서는 이더넷 IP 주소와 서브넷 마스크 등을 설정해 주어야 합니다. 제어기 자체의 이더넷 주소는 로봇을 설치한 후에 기본적으로 다음과 같이 설정되어 있습니다. TP의 이더넷 환경설정 화면은 그림 2-6를 참고하시기 바라며 기본 설정으로 되돌리시려면 표 2-2의 숫자와 같이 설정하시면 됩니다. 가급적 IP 주소, 서브넷 마스크, 게이트 웨이의 기본값을 변경하지 마시고 기본설정 그대로 이용하는 것을 권장합니다.
표 2-2 Hi5a제어기 이더넷 설정
제어기IP 주소 | 192.168.1.254 (기본 주소) |
제어기 서브넷마스크 | 255.255.255.0 |
제어기 게이트웨이 | 192.168.1.1 |
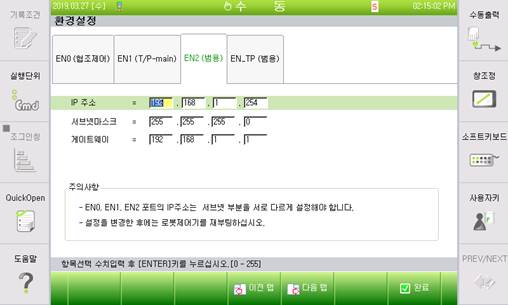
그림 2-6 TP 이더넷 설정 화면
제어기 자체의 이더넷 IP 주소는 [192.168.1.0] –[192.168.1.255] 사이에서 사용자가 자유롭게 변경이 가능합니다. 그러나 변경하고자 하는 IP 주소가 EN_TP(범용) [192.168.1.25] (기본), UDP2TCP 변환기 [192.168.1.11], Pick-it [192.168.1.12] 에서 사용하는 주소와 중복되어서는 안 됩니다. 참고로 [192.168.XXX.XXX] IP 주소 대역은 특별한 주소 대역으로 내부 사설 IP 주소로 이용됩니다.
로봇이Pick-it과 연동해서 작업을 하기 위해서는 JOB 파일에서 이더넷 데이터가 Pick-it으로 바로 가지 않고 UDP2TCP 변환기를 거쳐 가도록 수신부를 설정하는 이더넷 명령문에 UDP2TCP 변환기의 이더넷 IP주소와 포트번호를 입력해야 합니다. 이렇게 하면 로봇 제어기는 UPD2TCP 변환기로 데이터를 보내게 되고, UDP2TCP 변환기는 이를 받아서 다시 Pick-it으로 보냅니다. JOB 파일에서 설정해야 수신부(UDP2TCP 변환기)의 이더넷 IP 주소와 포트번호는 표 2-3를 참고하시기 바랍니다.
UDP2TCP 변환기의 주소와 포트번호는 고정되어 있고 사용자가 설정을 변경할 수 없습니다. 로봇 제어기와UDP2TCP 사이의 이더넷 IP 주소와 포트번호 설정은4장의 JOB 파일 예시에 더욱 자세한 설명이 있습니다.
표 2-3UDP2TCP 변환기 이더넷 IP 주소와 포트번호
UDP2TCP IP 주소 | 192.168.1.11 |
UDP2TCP UDP 포트번호 (RPORT) | 5001 |
제어기 UDP 포트번호 (LPORT) | 5001 |