4.2.2. 카메라 장착 위치에 따른 교정 방법
4.2.2. 카메라 장착 위치에 따른 교정 방법
교정판(Calibration Plate)을 이용하는 방법은 Pick-it 카메라의 설치 방법에 따라서 2가지가 있습니다. 카메라 설치 방법은 카메라를 로봇 팔에 부착하는 방식과 로봇이 아닌 고정된 지지대에 설치하는 방식이 있습니다.
먼저 카메라를 로봇 팔에 설치하는 방식은 교정판(Calibration Plate)을 바닥에 고정한 뒤에 5가지의 다른 위치와 자세로 로봇의 포즈를 움직인 뒤에 교정판(Calibration Plate)을 촬영해야 합니다. 카메라를 로봇이 아닌 고정된 지지대에 설치하는 경우에는 로봇 플랜지에 교정판을 설치하고 5가지의 다른 위치와 자세로 로봇의 포즈를 취한 뒤에 교정판(Calibration Plate)을 촬영해야 합니다. 두 방법은 카메라를 설치하는 위치에서 차이가 날 뿐 다른 5가지 위치와 자세로 촬영을 해서 교정을 수행한다는 점에서는 동일한 절차를 거칩니다.
그림 4-2에는 로봇 외부의 고정된 지지대에 카메라를 설치하고 Pick-it을 로봇에 교정하는 방법입니다. 그림에서 보듯이 카메라를 작업물이 잘 보이는 위치에 설치하고 교정판 은 로봇의 플랜지에 장착되어 있습니다. Pick-it을 로봇 좌표계에 교정하기 위해서 그림 4-3처럼 매번 다른 위치와 자세로 로봇을 움직인 다음에 로봇이 Pick-it으로 PICKIT.FCP 명령을 보내는 과정을 총 5번 수행해야 합니다. 로봇이 위치와 자세를 취할 때 주의할 점은 교정판의 네 모서리에 있는 표식 중 3개 이상이 카메라 영상에 보여야 하는 것입니다. 자세한 교정 절차와 주의점은 Pick-it 설명서를 참조하시기 바랍니다.

그림 4-2 지지대에 카메라 부착한 예시

그림 4-3 지지대에 카메라 부착한 경우 교정 시 자세 변경
그림 4-4처럼 카메라를 로봇 플랜지에 부착하는 경우에는 교정판(Calibration Plate)을 바닥에 고정시키고 카메라와 로봇의 위치와 자세를 변경하면서 교정 절차를 수행합니다. 이 경우에도 매번 다른 위치와 자세를 취하고 로봇이 Pick-it으로 PICKIT.FCP 명령을 보내야 합니다. 이 때 주의할 점은 앞서와 동일하게 카메라 촬영 영역 안에 교정판의 네 모서리에 있는 표식 중 3개 이상이 보여야 한다는 점입니다.

그림 4-4 카메라를 로봇 플랜지에 장착한 경우 예시
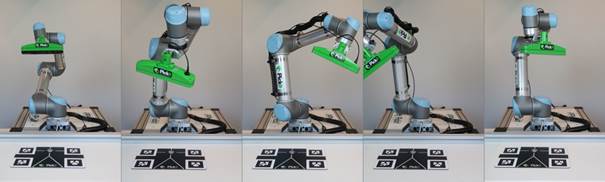
그림 4-5 로봇 플랜지에 카메라 부착한 경우 교정 시 자세 변경