2.2. 실링 환경설정
2.2. 실링 환경설정
실링 환경설정 메뉴에서는 본 기능에 필요한 각종 신호지정 및 동작환경 등에 대한 파라미터를 설정 합니다. 본 메뉴는 실러 축이 있을 때만 표시 됩니다.
『[F2]: 시스템』 → 『4: 응용 파라미터』 → 『20: 실링 환경설정』
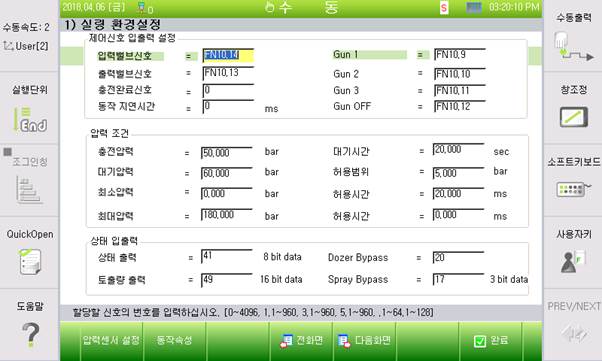
그림 2.2 실링 환경설정
(1)입출력 밸브
입력밸브신호와 출력밸브신호는 부스터의 입출력밸브에 대한 개폐신호를 디바이스넷으로 출력하기위한 출력할당 신호 입니다. 입출력 밸브신호는 모두 필수 입력 신호로 미 설정 시 실러축 동작이 제한 됩니다.
충전완료 신호는 실리더 위치가 충전완료 위치에 도달 한 경우 부스터에서 출력되는 신호를 로봇제어기에서 입력 받을 수 있도록 하는 입력할당 신호입니다. 미 설정 시 충전 완료 위치로 이동 후 압력조건의 충전압력 도달 여부를 기준으로 충전 완료 여부를 판단 합니다.
동작 지연시간은 밸브신호 출력 후 지정시간 동안 대기 후 실린더를 동작하고자 하는 경우 설정합니다.
Gun 신호의 경우, 적용 하고자 하는 시스템이 노즐이 3개인 3D건으로 구성된 경우, 각각의 건에 대응하는 밸브 신호를 지정합니다. 3D 건이 아닌 경우 0으로 입력 하십시오.
(2)압력 조건
충전압력은 충전 시 충전완료 신호가 설정되지 않은 경우, 충전 완료위치에서 설정한 압력이상의 압력이 검지될 때까지 충전완료를 대기하기 위한 기준압력 입니다. 충전압력의 대기시간 동안 측정 압력이 충전완료 조건을 충족하지 못하는 경우 에러를 검출하게 됩니다.
대기압력의 경우 실러충전 후 대기하는 동안 유지하고자 하는 압력을 입력 합니다. 허용 범위는 가압력 조정에 대한 오차 허용 범위를 입력합니다.
최소압력, 최대압력은 실링장비를 보호하기 위한 기준 압력을 설정합니다. 허용 기준을 초과하거나 미달하는 압력이 허용시간 이상 검지되는 경우 압력이상 에러를 발생하게 됩니다.
(3)상태 입출력
상태 출력 신호는 로봇 제어기에서 부스터의동작 상태(‘정지’, ‘가압’, ‘가압완료’, ‘토출’, ‘충전’, ‘대기압력 조정’)를 외부로 전달하기 위한 출력 신호를 할당 합니다. 상태 출력 신호를 0으로 설정한 경우 현재 상태를 출력하지 않습니다. 상태 출력 데이터는 설정한 출력신호 포트로부터 순차적으로 8bit의 데이터를 출력합니다. 단,최상위 비트는 부스터내 실러 용액이 가득 찬 상태인지 여부를 출력 합니다.
MSB:B7 | B6 | B5 | B4 | B3 | B2 | B1 | LSB:B0 |
Full | reserved | - | - | Dozer state | |||
B3 | B2 | B1 | B0 | 상태 |
0 | 0 | 0 | 0 | 정지 |
0 | 0 | 0 | 1 | 가압 중 |
0 | 0 | 1 | 0 | 가압완료(Pulse) |
0 | 0 | 1 | 1 | 토출 중 |
0 | 1 | 0 | 0 | 충전 중 |
0 | 1 | 0 | 1 | 대기압력 조정 중 |
토출량 출력 신호는 지정된 신호에 16 bit 데이터를 통해 토출된 실러용액의 부피를 cc 단위로 100배를 곱한 부호없는 정수형 데이터로 출력 합니다. 즉, 토출량 출력 신호를 수신하는 측에서는 수신 데이터를 100으로 나눈 값이 토출된 용량 입니다.
단 산출된 토출량은 충전기준 위치로부터 현재 실린더의 위치를 활용하여 단순 계산한 양이므로 실제 토출량과는 다소 차이가 있을 수 있습니다.
Dozer Bypass 신호는 부스터 이상 발생에 대한 비상대책으로 부스터를 우회하여 펌프에서 공급되는 실러용액을 직접 토출하기 위한 도저 바이패스 기능의 동작여부를 입력 받기 위한 입력 신호 입니다. 도저 바이패스모드에서는 부스터제어용 모터를 움직일 수 없도록 하기 때문에 압력 및 토출량 제어를 할 수 없습니다. 도포 시 밸브의 개폐 신호만 제어하게 되므로 도포 품질을 보장할 수 없습니다.
Spray Bypass 신호는 실러용액을 도포하지 않고 로봇의 동작경로만 확인하고자 하는 스프레이 바이패스 모드의 동작여부를 입력 받기 위한 3 bit의 입력신호입니다. 노즐이 3개로 구성된 3D 건의 경우 각각의 건에 대해 스프레이 바이패스모드를 개별적으로 설정할 수 있습니다.