4.2. STO기능 해제
4.2. STO기능 해제
로봇이 안전 파라미터를 위반하는 경우 SafeSpace가 STO를 활성화하고 로봇이 정지합니다. 조작자는 로봇과 안전 파라미터를 확인해야 합니다. 그리고 나서 조작자는 STO 기능을 해제하고 로봇을 안전한 영역으로 이동해야 합니다.
SafeSpace 모니터링 메뉴에서는 구성된 공간의 위반을 모니터링할 수 있습니다. 또한 위반에 의해 발생한 STO를 해제하고 수동 모드로 로봇을 안전한 영역으로 이동할 수 있습니다. 상태가 실시간으로 업데이트됩니다.
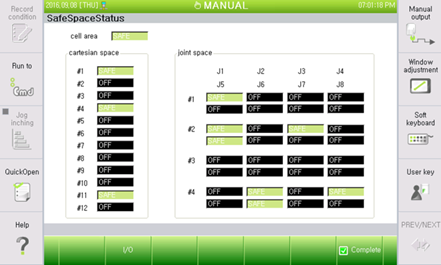
그림4.8SafeSpace 상태
STO가 활성화되면 각 펜던트에서 오류 메시지가 발생하고 SafeSpace 모니터링 메뉴의 I/O 페이지에 표현됩니다. STO의 원인을 확인하고 로봇을 유지보수할 수 있습니다.
I/O 페이지에는 입력/출력 신호의 상태 및 할당이 있습니다.
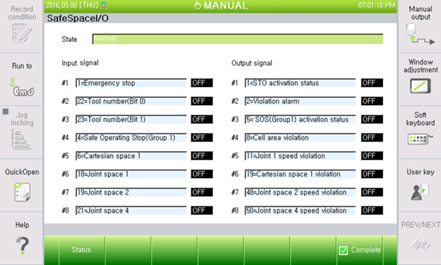
그림4.9SafeSpace I/O