8. HRSafeSpace -실습
아래와 같은 로봇 스폿 용접 셀 레이아웃을 설계했다고 가정해 봅시다.
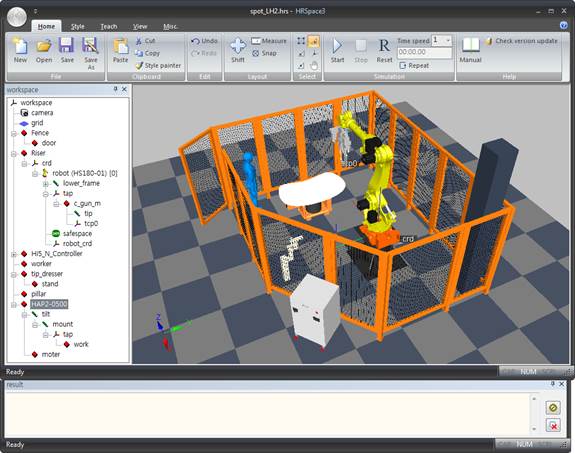
그림8.1 로봇 스폿 용접 셀 예시
라이저에 한 개의 HS180-01 조작기가 있습니다. C형 스폿 용접건은 로봇 플랜지에 장착되어 있으며 로봇은 높이가800mm인 라이저에 장착되어 있습니다. 각 작업 사이클 시작 시 인간 작업자가 로봇 앞의 포지셔너에 용접 공작물을 설치합니다. 셀 전체는 5면 펜스로 둘러싸여 있습니다. 천장의 덕트 때문에 로봇의 Z축 이동이 0 ~ 3400mm로 제한되어 있고 펜스 안에 기둥이 있다고 가정해 봅시다.
HRSpace 시각화의 도움을 받아 SafeSpace 파라미터를 구성한 후 생성된 ROBOT.SFS 파일을 실제 Hi5a 로봇 제어기에 다운로드합니다.