2.3.1. 자동 설정
2.3.1. 자동 설정
서보건 ‘기본 설정’의 자동 설정은 『[F1]: 전체 자동 설정』을 눌러 진행합니다. ‘전체 자동 설정’은 서보건의 이동전극이 자동으로 움직이기 때문에 아래의 조건이 반드시 만족되어야 합니다.
- 이동전극과 고정전극에 새 팁 부착
- 서보건 주변 작업자 부재
- 이동전극과 고정전극 사이에 작업물 부재
- 수동 모드
- 모터 온
- 이동전극 최대개방 금지(최대개방 위치와 일정거리 유격)
‘전체 자동 설정’은 다음과 같은 절차가 자동 진행됩니다.
(1) 엔코더 옵셋 보정
- 이동 전극이 최대 개방 위치로 이동.
- 최대 개방 위치에서 정지 후 엔코더 옵셋 보정 실행
(2) 축 원점 설정
- 서보건 3회 가압, 2회 개방 동작
- 3번째 가압 후 두 전극이 만나는 위치로 이동
- 해당 위치 사용자 확인
- 축 원점 설정 실행
(3) 소프트 리밋 설정
- 축 원점 설정 후 자동 실행
(4) 가압력-전류 테이블 설정
- 설정을 위한 메뉴로 자동 이동
서보건 기본 설정의 자동 설정은 서보건의 ‘엔코더 옵셋 보정’ 위치와 ‘축 원점 보정’ 위치를 자동으로 인식하여 해당 위치에서 ‘엔코더 옵셋 보정’, ‘축 원점 보정’과 ‘소프트 리밋 설정’을 진행합니다. 기본 설정의 자동 설정은 ‘가압력-전류 테이블 설정’을 자동 진행하지 않습니다. ‘서보건 가압력-전류 테이블 튜닝’챕터를 참고하여 설정을 진행하십시오.
‘전체 자동 설정’ 시 축 원점 위치 이동 후 아래와 같이 사용자에게 축 원점 위치를 확인합니다. 이 때 이동 전극의 위치와 귀환 전류(1A 이하)를 확인하여 살짝 맞닿는 위치에 있으면 ‘예’를 눌러 설정을 계속 진행하십시오. 만약 귀환 전류가 높거나 이동 전극과 고정 전극이 맞닿지 않는 상태이면 조그 키를 이용하여 미세 조정 후 ‘예’를 누르십시오. 자동 설정을 원하지 않는 경우 ‘아니오’를 눌러 설정을 종료하십시오.
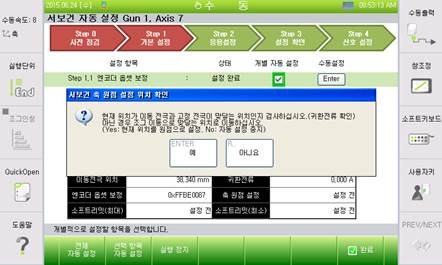
그림 2.5 축 원점 위치 사용자 확인
주의) 서보건 최대 개방 위치에 범퍼와 같은 금속 재질이 아닌 스토퍼가 달려 있는 경우 최대 개방 위치 추정이 어려울 수 있으니, 제거 후 설정하는 것을 권장합니다.
서보건 기본 설정의 화면 구성과 기능은 아래와 같습니다.
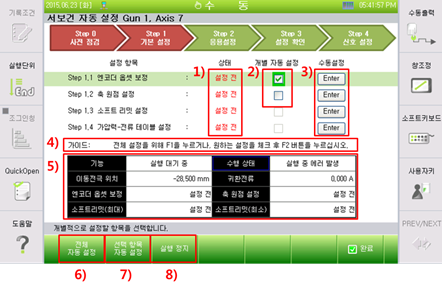
1) 상태: 현재 서보건 설정 상태(설정 전,완료, 변경 됨 중 하나)
2) 개별 자동 설정: 전체가 아닌 체크된 항목만 자동으로 설정하는 기능 지원.『[F2]: 선택 항목 자동 설정』을 누르면 체크된 항목만 자동으로 진행됩니다.
3) 수동설정: 해당 항목을 설정할 수 있는 화면으로 이동
- 엔코더 옵셋 보정
『[F2]: 시스템』 → 『3: 로봇 파라미터』 → 『4: 엔코더 옵셋』화면으로 자동 이동
- 축 원점 설정
『[F2]: 시스템』 → 『3: 로봇 파라미터』 → 『2: 축 원점』화면으로 자동 이동
- 소프트 리밋 설정
『[F2]: 시스템』 → 『3: 로봇 파라미터』 → 『3: 소프트 리밋』화면으로 자동 이동
- 가압력-전류 테이블 설정
『[F2]: 시스템』 → 『4: 응용 파라미터』 → 『1: 스폿용접』 → 『7: 서보건 가압력 튜닝』화면으로 자동 이동
4) 가이드: 현재 설정 상태나 에러 발생 시 원인 및 대처 방안 표기
5) 모니터링: 현재 설정 상황 및 서보건의 위치와 귀환 전류, 설정 값 등을 표시
6) 전체 자동 설정: 전체 자동 설정 수행 명령
7) 선택 항목 자동 설정: 개별 자동 설정 항목으로 지정된 항목만 자동 설정
8) 실행 정지: 진행 중인 설정을 정지