5.10. 재생속도 자동조절
5.10. 재생속도 자동조절
겨울철 낮은 온도로 초기 구동시 구동부의 마찰이 증가하여 에러를 유발할 수 있습니다. 재생속도 자동조절 기능은 낮은 재생속도로 로봇을 운전시켜(워밍업 효과) 에러발생요소 제거 및 작업의 지속적 수행을 하는 기능입니다. 기능 설정 전, 사용할 프로그램의 작업결과가 재생속도의 변화에 무관한지를 먼저 확인해야 합니다. 기능은 조건설정에서 실행 여부를 설정합니다.
n 무효
재생속도 자동조절 기능을 실행하지 않습니다.
n 유효
재생속도 자동조절 기능을 실행합니다.
『재생속도 자동조절=유효』로 설정하면 F2의 버튼이 활성화되어 기능의 세부설정 메뉴로 진입할 수 있습니다.
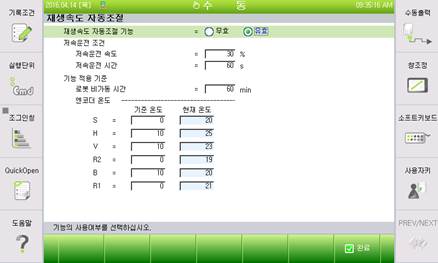
재생속도 자동조절 설정 메뉴
n 재생속도 자동조절 기능
기능의 사용여부를 선택합니다.
n 저속운전 조건
저속운전시 적용할 조건들을 설정합니다.
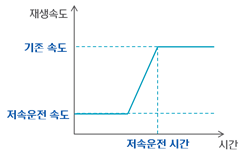
- 저속운전 속도: 저속운전으로 사용할 속도를 지정합니다.
- 저속운전 시간: 저속운전을 유지할 시간을 설정합니다. 기존속도로 환원되는 시간(=저속운전 시간/3)을 포함하여 설정하십시오.
n 기능 적용 기준
기능이 활성화되는 기준을 설정합니다.
- 로봇 비가동 시간: 로봇이 동작하지 않는 시간으로서 자동운전 및 조그를 제외한 동작, 자동운전 중 delay 또는 외부신호로 인한 로봇 정지, 제어기 전원 off, 모터 off, 절전모드 가동시간을 포함합니다. 로봇이 동작하지 않은 시간이 설정한 로봇 비가동시간보다 클 경우 기능이 활성화됩니다.
- 엔코더 온도: 기능이 동작하는 기준 엔코더 온도를 설정합니다. 현재 온도가 기준 온도보다 낮을 때 기능이 활성화 되며, 저속운전으로 현재온도가 기준온도보다 높아지면 재생속도를 기존속도로 변경 후 기능이 종료됩니다.

l 재생속도 자동조절기능은 일정한 속도를 유지해야하는 기능에는 적용되지 않습니다.적용되지 않는 기능으로는 시스템변수 _SPDRATE, 센서 동기, 아크가 있습니다.
l 설정한 저속운전 시간 이후에도 엔코더의 현재온도가 기준온도 이하이면 저속운전을 지속합니다. 이후 엔코더 온도가 기준온도를 만족할시 기존속도로 복원됩니다.
l 저속운전 속도에서 기존속도로의 복원은 (저속운전 시간/3) 시간동안 선형으로 증가합니다. 기존속도란 기능설정전에 기입한 5.6절의 자동운전 속도비율을 말합니다. 기능설정 후 변경하는 자동운전 속도비율은 기존속도로 저장되지 않습니다.