7.3.2. 축원점
7.3.2. 축원점
각 축의 기구학적 원점 위치를 등록할 수 있습니다. 축 원점 설정은 로봇의 직교 동작 정확도에 영향을 미치므로 정확한 값으로 변경하시기 바랍니다.
공장 출하 시는 표준 값이 설정되어 있습니다. 로봇과 주변 지그의 설치상황에 따라 S축 원점을 변경하거나, 툴의 부착 방향에 따라 R1축 원점을 변경할 필요가 있을 때 사용합니다.
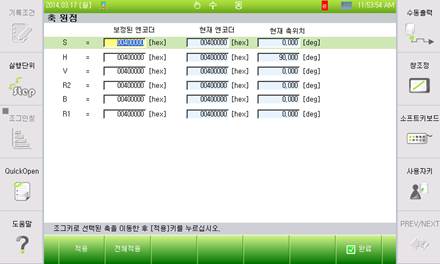
그림 7.61 축 원점 설정 화면

l 축 원점의 설정은 반드시 『엔코더 옵셋』 설정을 완료한 후에 설정하십시오. 엔코더 옵셋 설정이 변경되면 축 원점은 새로 설정해야 합니다.
l H, V, R2, B축은 “자동 캘리브레이션” 기능을 이용하여 자동으로 설정할 수 있습니다.
l 축 원점 설정을 변경하면 기존에 작성된 프로그램의 위치가 변경됩니다. 따라서 축 원점 설정은 반드시 초기 설치 단계에서만 실행해야 합니다.