7.3.5. B축 비사용구역
7.3.5. B축 비사용구역
B축의 비사용구역을 설정하는 기능입니다. B축 0도 부근에서는 R1축 회전 중심축과 R2축의 회전 중심축이 거의 평행하게 되는데, 로봇의 TCP가 직선이나 원호와 같은 보간 동작을 할 경우 작은 움직임에도 손목 축이 급격한 동작을 하게 됩니다.
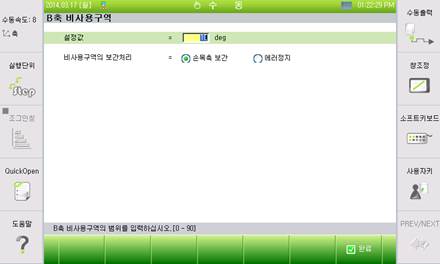
그림 7.65 B축 비사용구역 설정 화면
n 설정값: B축 비사용구역의 판단각도를 입력합니다.
n 비사용구역의 보간처리:
로봇의 궤적이 보간 동작으로 B축 비사용구역을 통과해야 하는 경우에 에러 처리하고 로봇을 정지할 지 여부를 설정합니다.