7.3.4. 엔코더옵셋
7.3.4. 엔코더옵셋
현재 엔코더의 위치를 엔코더의 원점 위치(0X400000위치)로 설정할 수 있습니다. 로봇 각축의 기준위치에서(각 축의 스케일이 부착된 위치) 엔코더의 원점을 결정합니다.
이 값은 공장 출하시에 설정하기 때문에 모터, 엔코더 교환, 기타 필요 시만 재설정하여 주십시오.
로봇의 각축을 조작하여 엔코더 옵셋 값을 설정합니다. 기록되는 엔코더 값은 Hexa(16진수)값 입니다.
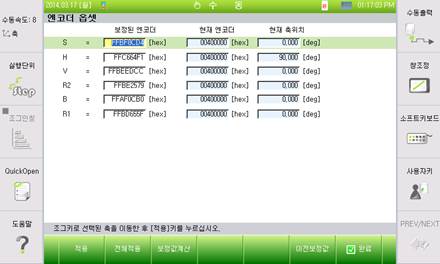
그림 7.63 엔코더 옵셋 화면
만일 작업 중 어떠한 이유에 의해 현재의 작업프로그램을 백업하고 『[F2]: 시스템』 → 『5: 초기화』 → 『1: 시스템 초기화』를 수행해야 하는 경우, 기존의 프로그램을 사용하기 위해 로봇은 초기화 이전의 기준위치와 동일한 위치를 유지해야 합니다. 이를 위해서 엔코더 옵셋 값을 적어두었다가 입력하여 사용합니다. 보정 값의 입력은 화면 우측의 소프트키보드를 열어서 Hexa값으로 직접 입력할 수 있습니다.
만약, 엔코더 옵셋(16진수) 값이 아니라, 축 위치값(mm 혹은 degree) 값을 적어둔 경우에는 [F1: 적용] 키를 누르십시오. 축 위치 입력 대화상자가 나타나면, 여기에 적어둔 위치값을 입력하고[ENTER]키를 누르면 됩니다.
(대화상자의 디폴트 값은 기준 자세 값이므로, 값 입력 없이 그대로 [ENTER]키를 누르면 현재 엔코더값이 원점 위치(0X400000)로 설정 됩니다.)

그림 7.64 축 위치 입력 대화상자